My Notes
My personal notes on study and life
Watch it in:https://o2hcho.github.io/my-notes/
Markdown 终极语法指南 (The Ultimate Markdown Cheatsheet)
欢迎来到我的个人知识库!这是一个全面的 Markdown 语法参考。它涵盖了从基础到高级的各种语法,特别包含了 GitHub Flavored Markdown (GFM) 的常用功能以及 LaTeX 数学公式的用法。
目录 (Table of Contents)
- Markdown 终极语法指南 (The Ultimate Markdown Cheatsheet)
- 目录 (Table of Contents)
- 1. 标题 (Headings)
- 2. 文本格式化 (Text Formatting)
- 3. 段落与换行 (Paragraphs & Line Breaks)
- 4. 引用 (Blockquotes)
- 5. 列表 (Lists)
- 6. 代码 (Code)
- 7. 链接 (Links)
- 8. 图片 (Images)
- 9. 水平分割线 (Horizontal Rules)
- 10. 表格 (Tables)
- 11. 任务列表 (Task Lists)
- 12. LaTeX 数学公式 (Mathematical Formulas)
- 13. 高级技巧 (Advanced Tips)
- 14. 彩色提示框 (Admonitions)
1. 标题 (Headings)
使用 # 号来创建标题,# 的数量代表标题的级别。
# 这是一级标题
## 这是二级标题
### 这是三级标题
#### 这是四级标题
##### 这是五级标题
###### 这是六级标题
2. 文本格式化 (Text Formatting)
| 样式 | 语法 | 示例 |
|---|---|---|
| 粗体 | **文字** 或 __文字__ | Hello, World! |
| 斜体 | *文字* 或 _文字_ | Hello, World! |
| 粗斜体 | ***文字*** 或 ___文字___ | Hello, World! |
~~文字~~ |
如下:
| 样式 | 语法 | 示例 |
| :--- | :--- | :--- |
| **粗体** | `**文字**` 或 `__文字__` | **Hello, World!** |
| *斜体* | `*文字*` 或 `_文字_` | *Hello, World!* |
| ***粗斜体*** | `***文字***` 或 `___文字___` | ***Hello, World!*** |
| ~~删除线~~ | `~~文字~~` | ~~Goodbye, World!~~ |
3. 段落与换行 (Paragraphs & Line Breaks)
-
新段落: 在两段文字之间留一个空行。
-
强制换行: 在一行的末尾输入两个或更多的空格,然后按回车。
这行文字的末尾有两个空格,所以会强制换行。
4. 引用 (Blockquotes)
使用 > 符号来创建引用块。可以进行嵌套。
这是一个引用。
这是一个嵌套的引用。
嵌套可以有很多层。
5. 列表 (Lists)
无序列表 (Unordered Lists)
使用 *, +, 或 - 来创建无序列表。(他们是等价的)
- 列表项 A
- 嵌套列表项 A1
- 嵌套列表项 A2
- 列表项 B
- 列表项 C
有序列表 (Ordered Lists)
使用数字加点 . 来创建有序列表。
- 第一步
- 第二步
- 步骤 2.1
- 步骤 2.2
- 第三步
6. 代码 (Code)
行内代码 (Inline Code)
使用反引号 ` 来包裹代码。例如, console.log('Hello'); 是一个行内代码。
代码块 (Fenced Code Blocks)
使用三个反引号 ``` 来创建代码块,并可以在后面指定语言以获得语法高亮。
# 这是一个 Python 代码块
def factorial(n):
if n == 0:
return 1
else:
return n * factorial(n-1)
print(factorial(5))
// 这是一个 JavaScript 代码块
const greet = (name) => {
console.log(`Hello, ${name}!`);
};
greet('GitHub');
7. 链接 (Links)
8. 图片 (Images)
语法与链接类似,只是在前面加一个感叹号 !。

9. 水平分割线 (Horizontal Rules)
在一行中使用三个或更多的 *, -, 或 _ 来创建分割线。
10. 表格 (Tables)
使用管道符 | 和连字符 - 来创建表格。使用冒号 : 控制对齐方式。
| 左对齐 | 居中对齐 | 右对齐 |
|---|---|---|
| 苹果 | 香蕉 | 橙子 |
| 笔记本 | 显示器 | 鼠标 |
| Markdown | LaTeX | Git |
11. 任务列表 (Task Lists)
在列表项前加上 [ ] 或 [x] 来创建任务列表。
- 完成 Markdown 语法学习
- 将笔记上传到 GitHub
- 学习 Git 的更多高级用法
12. LaTeX 数学公式 (Mathematical Formulas)
这是在技术笔记中非常有用的功能。GitHub 的 Markdown 渲染器支持 MathJax。
行内公式 (Inline Formulas)
使用一对美元符号 $ 包裹 LaTeX 代码。
示例: 爱因斯坦的质能方程是。一个简单的二次方程是 。
块级公式 (Block Formulas)
使用两对美元符号 $$ 包裹 LaTeX 代码,公式会居中并单独成行。
示例: 著名的欧拉恒等式:
高斯积分:
常用 LaTeX 语法:
| 描述 | 语法 | 渲染效果 |
|---|---|---|
| 分数 | \frac{a}{b} | |
| 求和 | \sum_{i=1}^{n} | |
| 积分 | \int_{a}^{b} | |
| 极限 | \lim_{x \to \infty} | |
| 希腊字母 | \alpha, \beta, \gamma | |
| 上标/下标 | x^2, y_{10} | , |
更多LaTex语法:
| 含义 (Meaning) | LaTeX 命令 (Command) | 显示效果 (Rendered) |
|---|---|---|
| 逻辑连词 (Logical Connectives) | ||
| 与 (and) | \land 或 \wedge | |
| 或 (or) | \lor 或 \vee | |
| 非 (not) | \neg | |
| 蕴含 (implies) | \rightarrow | |
| 逻辑蕴含 (logical implication) | \Rightarrow | |
| 当且仅当 (if and only if, iff) | \leftrightarrow | |
| 逻辑等价 (logical equivalence) | \Leftrightarrow | |
| 否定 | \neg | |
| 量词 (Quantifiers) | ||
| 对所有 (for all) | \forall | |
| 存在 (there exists) | \exists | |
| 集合论 (Set Theory) | ||
| 属于 (element of) | \in | |
| 不属于 (not an element of) | \notin | |
| 子集 (subset of) | \subset | |
| 子集或等于 (subset or equal to) | \subseteq | |
| 父集 (superset of) | \supset | |
| 父集或等于 (superset or equal to) | \supseteq | |
| 并集 (union) | \cup | |
| 交集 (intersection) | \cap | |
| 空集 (empty set) | \emptyset | |
| 证明与推论 (Proof and Inference) | ||
| 所以 (therefore) | \therefore | |
| 因为 (because) | \because | |
| Tautology (顶) | \top | |
| Contradiction (底) | \bot | |
| 断言/推导出 (turnstile) | \vdash |
希腊字母 (Greek Letters)
注意: 大写希腊字母的命令通常是首字母大写,例如 \gamma (小写 ) 和 \Gamma (大写 )。
| 小写字母 | LaTeX 命令 | 大写字母 | LaTeX 命令 |
|---|---|---|---|
\alpha | A (就是A) | ||
\beta | B (就是B) | ||
\gamma | \Gamma | ||
\delta | \Delta | ||
\epsilon | E (就是E) | ||
\zeta | Z (就是Z) | ||
\eta | H (就是H) | ||
\theta | \Theta | ||
\iota | I (就是I) | ||
\kappa | K (就是K) | ||
\lambda | \Lambda | ||
\mu | M (就是M) | ||
\nu | N (就是N) | ||
\xi | \Xi | ||
o | O (就是o) | ||
\pi | \Pi | ||
\rho | P (就是P) | ||
\sigma | \Sigma | ||
\tau | T (就是T) | ||
\upsilon | \Upsilon | ||
\phi | \Phi | ||
\chi | X (就是X) | ||
\psi | \Psi | ||
\omega | \Omega |
特殊的变体字母:
| 变体 | LaTeX 命令 |
|---|---|
\varepsilon | |
\vartheta | |
\varpi | |
\varrho | |
\varsigma | |
\varphi |
基本运算符 (Basic Operators)
| 含义 | LaTeX 命令 | 渲染效果 |
|---|---|---|
| 加号 | + | |
| 减号 | - | |
| 乘号 (点) | \cdot | |
| 乘号 (叉) | \times | |
| 除号 (分数线) | \frac{a}{b} | |
| 除号 (横线) | \div | |
| 正负号 | \pm | |
| 负正号 | \mp | |
| 等于号 | = | |
| 不等于 | \ne 或 \neq | |
| 约等于 | \approx | |
| 大于 | > | |
| 小于 | < | |
| 大于等于 | \ge 或 \geq | |
| 小于等于 | \le 或 \leq |
13. 高级技巧 (Advanced Tips)
转义字符 (Escaping Characters)
如果你想显示 Markdown 中的特殊字符(如 * 或 #),可以在它们前面加上反斜杠 \。
我想显示一个星号 *,而不是让它变成斜体。
嵌入 HTML
Markdown 支持直接写入 HTML 代码,这给了你更大的灵活性。
示例:
使用 <u> 标签实现下划线效果。
使用 <details> 和 <summary> 创建一个可折叠的内容区域。
点击这里展开/折叠
这里是可以被隐藏和显示的内容捏^-^。14. 彩色提示框 (Admonitions)
这是我们新安装的 mdbook-admonish 插件的效果展示。它可以生成醒目的彩色区块,非常适合用来写提示、警告或补充说明。
基础用法
语法代码:
```admonish note "这是标题"
这里写提示框的内容。支持 **Markdown** 语法。
```
渲染效果:
更多类型展示
1. 警告 (Warning)
2. 成功 (Success)
3. 小贴士 (Tip)
4. 错误/失败 (Failure)
5. 折叠样式 (Collapsible)
如果不希望内容占用太多空间,可以设置为默认折叠:
高等数学学习笔记(Advanced mathematics notes)
这是我的高等数学学习笔记,用于方便的查询我学习的进度(以及学一下latex语法) 脑子一抽想试试用markdown来记数学笔记,希望不会又不填坑
目录(Table of Contents)
一.零基础知识
一些基础知识防止上大学上成傻逼了都忘了
1.基本逻辑
歪日真有点记不清了
若A B,则称A是B的充分条件,B是A的必要条件
若A B,则称A是B的充要条件
若A B,则称A是B的无关条件
2.数学归纳法
设T(n)是关于自然数n的命题,
- T(1)成立
- 设T(k)(k>=1)成立
- 证明T(k+1)成立
则T(n)成立
二.函数极限与连续
1.定义
1.函数极限的 ε-δ 定义
函数 在 趋近于 时的极限是 ,记作:
这直观地表示:当 的值“足够接近”点 时(但不等于 ),函数 的值就可以“任意地接近”值 。
2. 形式化定义:
设函数 在点 的一个去心邻域内有定义。极限 成立,当且仅当:
对于任意给定的正数 (无论它有多小),总存在一个正数 ,使得对于所有满足 的 ,都有 成立。
用逻辑量词的语言来表达,即:
核心前提:下面的所有等价关系,都是在自变量 的前提下成立的。
常用等价无穷小替换表
| 序号 | 原函数 | 等价无穷小 | 说明 |
|---|---|---|---|
| 1 | 正弦 | ||
| 2 | 正切 | ||
| 3 | 反正弦 | ||
| 4 | 反正切 | ||
| 5 | (高频,注意是 级别) | ||
| 6 | 指数(e为底) | ||
| 7 | (其中 ) | 指数(a为底) | |
| 8 | 对数 | ||
| 9 | 对数(a为底) | ||
| 10 | 幂函数(广义二项式) | ||
| 11 | (序号10的特例, ) | ||
| 12 | (序号10的特例, ) | ||
| 13 | (高阶无穷小) | ||
| 14 | (高阶无穷小) | ||
| 15 | (高阶无穷小) | ||
| 16 | (高阶无穷小) |
使用等价无穷小的核心规则和注意事项
-
前提是 :
- 如果 ,那么 。
- 核心:你必须替换掉趋向于0的那个部分。
-
只能在乘除法中替换:
- 正确:
- 正确:
-
绝不能在加减法中随意替换 (除非特殊情况):
- 错误示例:
- 如果错误地替换 和 ,会得到 。
- 正确做法 (方法一:泰勒展开): 原式
- 正确做法 (方法二:通分变换): 原式 现在是乘除法了,可以替换:
-
加减法替换的例外 (非等阶无穷小):
- 如果两个无穷小不是等阶的,加减时可以“抓大头”(保留低阶项)。
- 例如:。
- 这里 是 的一阶无穷小, 是二阶无穷小。 是主导项(低阶项),所以 。
把这个表和规则记牢,求极限会快很多!
洛必达法则的适用条件
假设我们要计算极限 (这里的 可以是有限值,也可以是 或 ):
-
函数极限为 0/0 或 / 型
- 这是最重要的前提条件。你必须首先检查极限是否为“未定式”。
- 型: 并且 。
- 型: 并且 。
- 注意:这里的 不区分正负。
-
函数可导
- 在点 的某个去心邻域内(即不包括 点本身的一个小区间,如 ),函数 和 都必须是可导的。
-
分母导数不为零
- 在上述的同一个去心邻域内,分母的导数 必须不等于 0。
- (这个条件在实际应用中通常是满足的,如果 在 附近处处为0,那么 就是个常数,极限一开始就不会是 或 型)。
-
导数商的极限存在
- 这个新的极限必须存在。
- “存在”在这里有两种含义:
- 极限为一个有限的常数 。
- 极限为无穷大( 或 )。
- 如果导数商的极限不存在(例如,它是一个振荡的极限,像 ),那么洛必达法则不适用,你不能反过来说明原极限不存在。
总结(结论):
只有当上述四个条件同时满足时,你才能使用洛必达法则,并且原极限等于导数商的极限:
使用时的常见陷阱与注意事项
-
陷阱一:不是 或 型就用
- 致命错误。例如:。
- 原极限 。
- 如果错误使用洛必达法则:。(错误)
-
陷阱二:导数商的极限不存在,就说原极限不存在
- 错误。例如:
- 这是 型。如果使用洛必达法则:。这个新极限在1和2之间振荡,极限不存在。
- 但原极限是存在的:。
- 这说明洛必达法则失效,必须换用其他方法(如夹逼定理或等价无穷小)。
-
陷阱三:用于其他未定式(, , , , )
- 洛必达法则不能直接用于这些类型。你必须首先通过代数变形(例如通分、取对数、写成倒数形式)将它们转化为 或 型,然后再使用洛必达法则。
两个重要极限
第一个重要极限:
1. 公式
2. 形式解读
- 这是一个 型的未定式。
- 这个极限的核心是:当 趋近于0时, 这个无穷小量与 是等价无穷小。
- 适用条件:公式中的 可以替换为任何趋向于0的表达式。
- 例如:。
- (此时 ,当 时 )
- (此时 ,当 时 )
3. 意义与应用
- 计算导数的基础:它是推导 导数公式的关键步骤。
- 解决 型极限:在求极限时,它可以用来替换 ,是等价无穷小替换中最基本的一个。
第二个重要极限:
1. 公式 (两种等价形式)
形式一 ( ):
形式二 ( ): (注:形式二是由形式一通过令 换元得到的,当 时,)
2. 形式解读
- 这是一个 型的未定式。
- 这个极限定义了自然常数 ()。
- 适用条件:公式必须严格满足 的结构,并且无穷小和无穷大的指数部分必须是互为倒数的关系。
3. 意义与应用
- 定义自然常数 :这是 最早被发现和定义的方式,与银行复利计算的极限密切相关。
- 计算 型极限:这是解决此类未定式极限的标准工具,通常需要通过换元或凑指数的方式将其转化为标准形式。
- 推导导数 :它是推导 和 的基础。
这两个极限在微积分中扮演着承上启下的作用,是必须熟练掌握的。
自动控制原理的笔记
先放在这里,如果真的开始记了就删掉这句
目录
- 自动控制原理的笔记
- 1.自动控制系统的基本控制方式
- 2.控制系统的数学模型
- 3.动态结构图的等效变换
- 4.信号流图与梅逊公式
- 5.线性系统的时域分析法
- 二阶系统单位阶跃响应性能指标笔记
- 稳态误差
- 根轨迹绘图法则与参数计算
- 频域分析:伯德图绘制速查
- 频域分析:奈氏图 (Nyquist Plot) 绘制速查
- 频域稳定判据速查
- 频域分析:裕度计算速查 (PM & GM)
- 频域校正:串联超前与滞后校正
- 自动控制原理:期末/考研高频考点手册 (核心总结版)
1.自动控制系统的基本控制方式
自动控制系统的定义:为自动达到某一目的,由相互制约的各个部分按一定规律组织成的、具有一定功能的整体。
自动控制系统的组成:控制器、被控对象、反馈环节、中间环节等。
自动控制系统基本控制方式:开环控制、闭环控制和复合控制三种。
1.1开环控制
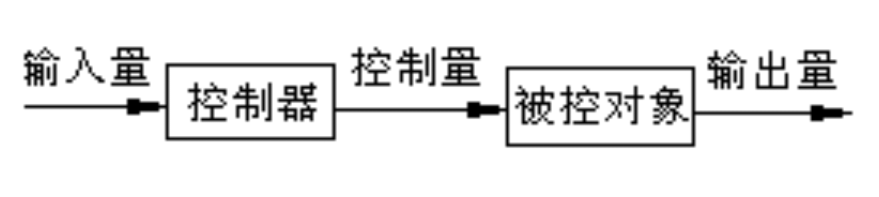
特点:控制器与被控对象之间只有正向控制作用而没有反馈作用,简单、控制精度低。
2.2闭环控制
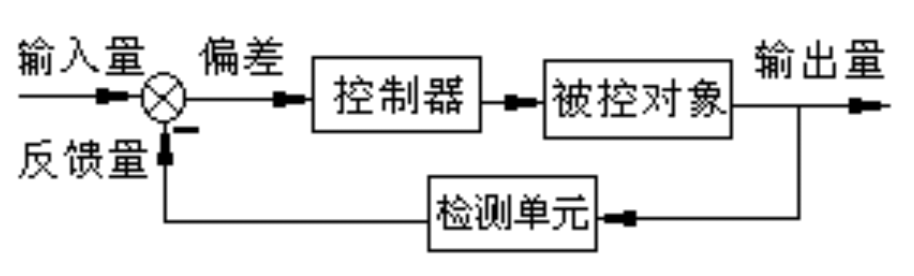
负反馈:偏差量=输入量-反馈量
特点:
- 控制精度高,稳定性好
- 对反馈设备要求高,价格贵,系统结构复杂
1.3复合控制
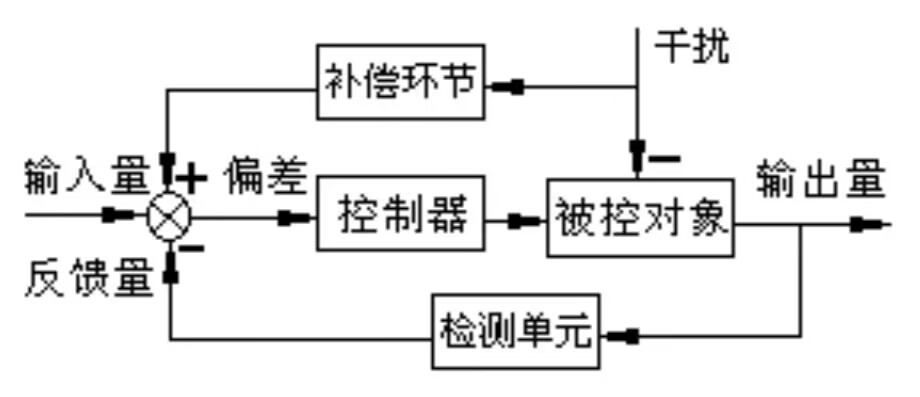
干扰补偿的开环控制和按偏差的闭环控制相结合
2.控制系统的数学模型
2.1傅里叶变换与拉普拉斯变换
为什么从傅里叶变换转向拉普拉斯变换?
在信号处理和系统分析的早期,傅里叶变换(Fourier Transform)是一个极其强大的工具。它能将一个复杂的时域信号分解成一系列不同频率的正弦波,让我们能在频域中分析信号的特性。然而,在自动控制领域,傅里-叶变换有几个关键的局限性,而拉普拉斯变换(Laplace Transform)恰好解决了这些问题。
傅里叶变换的核心局限:
-
收敛条件的严苛性:傅里叶变换要求信号在整个时间轴上是“绝对可积”的(即 )。这意味着,只有那些随着时间推移,幅值最终会衰减到零的稳定信号才能进行傅里-叶变换。但在控制系统中,我们经常会遇到两类不满足此条件的信号:
- 阶跃信号 (Step Function):例如,一个系统启动时,输入信号从0突然变为1并保持不变。这种信号显然不是绝对可积的。
- 发散信号:在一个不稳定的系统中,输出可能会随时间无限增大(如 ,其中 )。这类信号也无法进行傅里-叶变换。
-
无法分析系统稳定性:傅里叶变换主要分析的是系统的稳态响应,即系统在运行了足够长时间后,对持续输入(如正弦波)的反应。它无法直接告诉我们系统的暂态响应(系统在刚受到输入信号时的初始反应)以及系统的稳定性(系统在受到扰动后是趋于稳定还是发散)。而对于控制系统设计来说,保证稳定性是首要任务。
-
对初始条件处理不便:在解决微分方程时,系统的初始状态(如电容的初始电压、弹簧的初始位移)至关重要。傅里-叶变换在处理这些非零初始条件时非常不方便。
拉普拉斯变换的优势:
为了克服这些局限,拉普拉斯变换被引入。可以将拉普拉斯变换看作是傅里叶变换的“增强版”或“推广版”。
它的定义为:
这里的关键是复变量 。
-
引入衰减因子,放宽收敛条件:
- 中的实部 起到了一个衰减因子的作用。在积分中乘以 其中的 项可以强制一个原本发散的函数(如 )收敛。只要我们选择一个足够大的 ( ),就可以让乘积 变得绝对可积,从而保证积分能够收敛。
- 这就意味着,即便是阶跃信号、斜坡信号甚至某些指数增长的信号,只要在一定的 取值范围内,都可以进行拉普拉斯变换。这个范围被称为收敛域 (Region of Convergence, ROC)。
-
统一分析暂态与稳态,并判断稳定性:
- 复频率 所在的复平面(s平面)成为了分析系统特性的强大工具。系统的传递函数 的极点(使 变为无穷大的 值)在s平面上的位置直接决定了系统的性能。
-
方便处理初始条件:拉普拉斯变换的微分定理 ,很自然地将时域中的初始条件 包含进了频域的代数方程中,使得求解微分方程变得异常简洁。
总结一下:从傅里叶变换到拉普拉斯变换,本质上是为了将分析的信号范围从稳定的、能量有限的信号扩展到更广泛的、可能发散的、有初始条件的工程信号,并且提供了一个能够同时分析系统暂态、稳态和稳定性的统一框架。
拉普拉斯变换的本质
拉普拉斯变换的本质可以理解为:将一个定义在时域上的函数(通常是微分方程),映射到一个定义在复频域(s域)上的代数方程。
这个过程的核心思想与傅里-叶变换类似,都是一种基变换。
-
傅里叶变换:将信号分解为一系列具有不同频率 的、永不衰减的虚指数函数 (即正弦和余弦波)的线性组合。它的“基”是
-
拉普拉斯变换:将信号分解为一系列具有不同复频率 的、可能衰减或增长的虚指数函数 的线性组合。它的“基”是
这个“基”既包含了振荡特性(由 决定),也包含了衰减或增长的包络特性(由 决定)。因此,拉普拉斯变换能够描述和分析比傅里叶变换更复杂的动态行为,这正是控制系统所需要的。
一句话概括其本质:拉普拉斯变换通过一个巧妙的积分变换,将复杂的“微积分运算”(微分和积分)转换为了简单的“代数运算”(乘除和加减),极大地简化了动态系统的分析和求解过程。
拉普拉斯变换对照表
| 序号 | 原函数 (时域) f(t) | 象函数 (s域) F(s) | 说明 |
|---|---|---|---|
| 1 | 单位冲激函数 | ||
| 2 | 单位阶跃函数 | ||
| 3 | 单位斜坡函数 | ||
| 4 | (n为正整数) | 幂函数 | |
| 5 | 指数衰减函数 | ||
| 6 | |||
| 7 | (n为正整数) | ||
| 8 | 正弦函数 | ||
| 9 | 余弦函数 | ||
| 10 | 衰减正弦 | ||
| 11 | 衰减余弦 | ||
| 12 | 双曲正弦 | ||
| 13 | 双曲余弦 | ||
| 14 | 一阶系统阶跃响应 | ||
| 15 | 典型一阶惯性环节 | ||
| 16 | | 典型二阶欠阻尼系统 |
注:即1(t),通常可省略。
重要性质与定理
| 性质/定理 | 时域运算 | s域运算 |
|---|---|---|
| 线性性质 | ||
| 时移性质 | ||
| 复频移性质 | ||
| 尺度变换 | , | |
| 时域微分定理 | ||
| 时域积分定理 | ||
| s域微分定理 | ||
| s域积分定理 | ||
| 卷积定理 | ||
| 初值定理 | ||
| 终值定理 | (仅当系统稳定时) |
2.2传递函数
什么是传递函数?
1. 核心定义
传递函数是描述线性时不变 (Linear Time-Invariant, LTI) 系统动态特性的数学模型。它定义为:
在零初始条件下,系统输出信号的拉普拉斯变换与输入信号的拉普拉斯变换之比。
用数学公式表示为:
其中:
- 是传递函数。
- 是系统输出信号 的拉普拉斯变换。
- 是系统输入信号 的拉普拉斯变换。
- 是复变量,即 。
关键点解读
-
线性时不变系统 (LTI):这是传递函数应用的前提。
- 线性 (Linear):系统满足叠加原理。如果输入 产生输出 ,输入 产生输出 ,那么输入 必然产生输出 。
- 时不变 (Time-Invariant):系统的特性不随时间变化。今天对系统施加一个输入信号得到的响应,和明天施加同样的输入得到的响应,除了时间起点不同,响应的形态是完全一样的。
-
零初始条件 (Zero Initial Conditions):这是定义的另一个关键前提。在分析传递函数时,我们假设系统在输入信号作用之前处于完全静止的状态。这样做是为了将系统的响应完全归因于输入信号,从而分离出系统本身的固有特性。
-
s域模型:传递函数是定义在复频域(s域)中的,而不是时域。它把描述系统的时域微分方程转换为了s域的代数方程,极大地简化了分析和计算。
传递函数的物理意义和作用
1. 描述系统自身的固有特性
传递函数 只与系统自身的结构和参数有关,而与输入信号的形式和大小无关。你可以把传递函数想象成一个系统的“指纹”或“DNA”,它揭示了系统内部的动态规律。
2. 揭示系统的动态性能
通过分析传递函数的极点和零点来预判系统性能。
-
极点 (Poles):使传递函数 的分母多项式为零的 值。
- 极点的位置直接决定了系统的稳定性和响应模式。
- 极点在s平面的左半平面:系统是稳定的。
- 极点在s平面的虚轴上:系统处于临界稳定状态。
- 极点在s平面的右半平面:系统是不稳定的。
- 极点的位置直接决定了系统的稳定性和响应模式。
-
零点 (Zeros):使传递函数 的分子多项式为零的 值。
- 零点影响系统响应的形态和幅值,但不影响系统的稳定性。
3. 简化系统分析
- 化微分方程为代数运算:系统的总输出 就是输入 乘以传递函数 ,即 。
- 便于系统框图分析:复杂的系统中,各个组件可以用各自的传递函数表示,通过简单的框图连接规则,就能求出整个系统的总传递函数。
2.3如何求传递函数?
求传递函数通常有以下步骤:
- 建立物理模型:根据物理定律写出描述系统动态行为的微分方程。
- 进行拉普拉斯变换:对微分方程的两边进行拉普拉斯变换,假设所有初始条件为零。
- 整理代数方程:将变换后的方程整理成输出量 和输入量 的关系式。
- 写出传递函数:计算出 的比值。
示例:一个简单的R-C电路

考虑一个串联R-C电路,输入为电压 ,输出为电容两端的电压 。
-
建立微分方程: 根据基尔霍夫电压定律 (KVL),并结合电容电流公式 ,可得:
-
进行拉普拉斯变换 (设初始条件 ):
-
整理代数方程:
-
写出传递函数:
这个传递函数就完整地描述了这个R-C电路的动态特性。它只有一个极点 ,位于左半平面,因此该系统是稳定的。
总结
大概就是把时域内的微分积分之类的复杂运算,转换成s域的乘上或者除以一个s,然后再算出系统的传递函数(输出/输入),主要是要背一下三角函数对应的s计算。
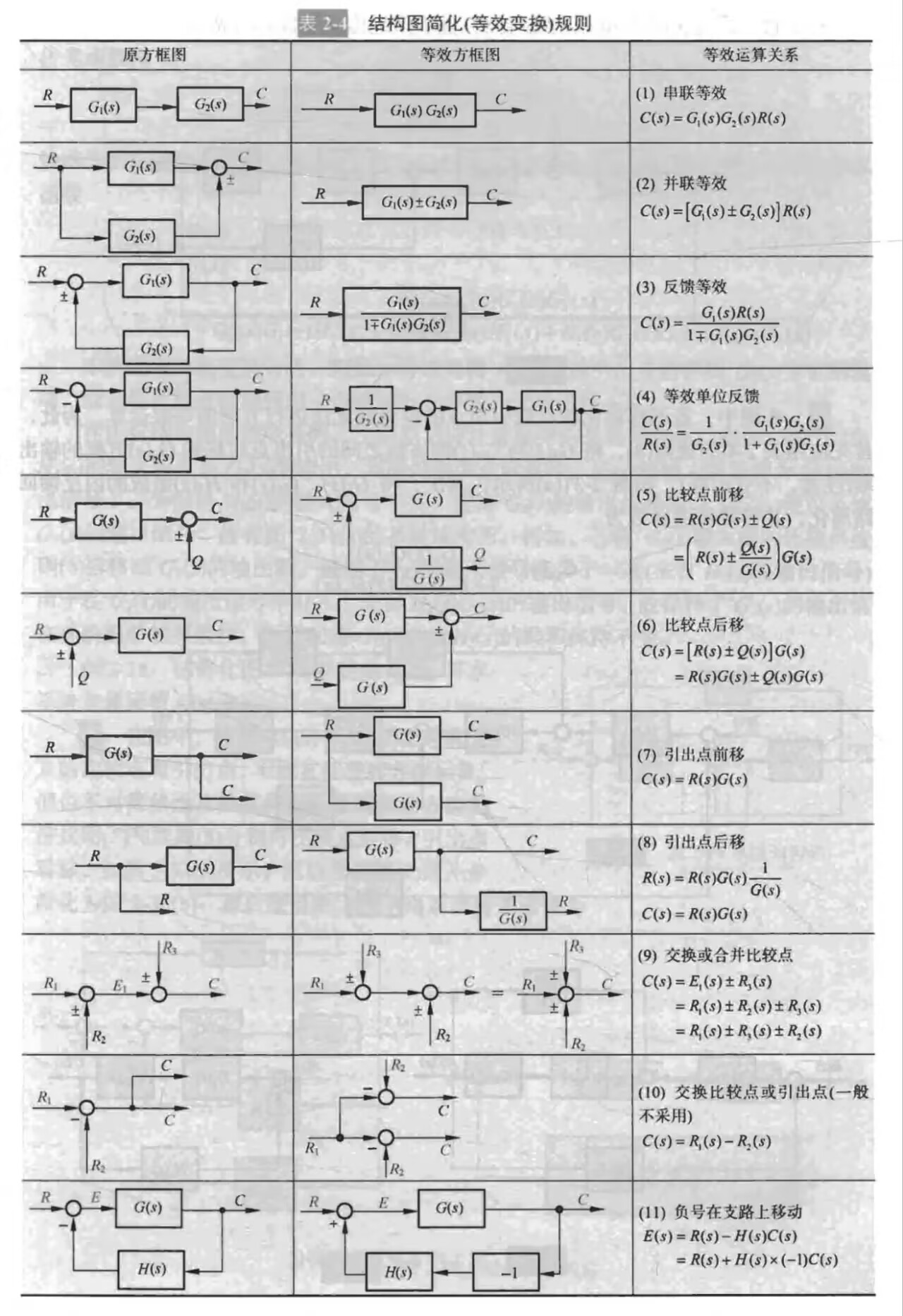
3.动态结构图的等效变换
这部分感觉还是比较符合直觉,下面贴个图片以供查询
4.信号流图与梅逊公式
4.1 信号流图的基本性质
信号流图是系统线性方程组的图形化表示,也是分析控制系统的一种工具,特别适用于复杂系统的传递函数求解。它与方框图(Block Diagram)类似,但更简洁。
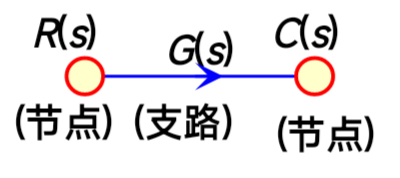
信号流图由节点和支路组成:
- 节点 (Nodes): 代表系统的变量或信号(例如 输入, 输出, 或任何中间信号 )。每个节点的值等于所有流入该节点的信号之和。
- 支路 (Branches): 是连接两个节点的有向线段。每条支路都有一个相关的增益 (Gain) 或传递函数(例如 或 )。信号沿着支路箭头方向流动,并在流过时乘以该支路的增益。
基本性质:
- 信号流动: 信号只能沿着箭头方向在支路上流动。
- 节点求和: 一个节点的值等于所有指向该节点的支路信号(支路增益 起始节点值)的总和。
- 信号广播: 从一个节点出发的信号,会传递给所有从该节点引出的支路。
- 支路性质: 支路相当于乘法器,信号流经支路时,被乘以支路增益而变成另一信号
4.2 核心术语 (Key Terminology)
要使用梅森增益公式,必须先理解以下几个关键概念:
- 通路 (Path): 沿着箭头方向,从一个节点到另一个节点经过的一系列连续支路,且任何节点都不能通过超过一次。
- 前向通路 (Forward Path): 从输入节点(源节点,只有信号流出)到输出节点(阱节点,只有信号流入)的一条通路。
- 回路 (Loop): 一条闭合的通路。它从一个节点出发,沿着箭头方向最终又回到该节点,且中间不重复经过任何节点。
- 回路增益 (Loop Gain): 回路中所有支路增益的乘积。
- 不接触回路 (Non-touching Loops): 如果两个(或多个)回路没有任何共同的节点,则称它们为不接触回路。
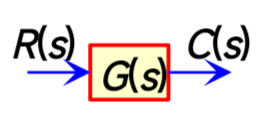
4.3 信号流图的绘制
由系统结构图绘制信号流图:
- 用小圆圈标出传递的信号,得到节点。
- 用线段表示结构图中的方框,用传递函数代表支路增益。(注意:信号流图的节点只表示变量的相加)
 |  |
 | 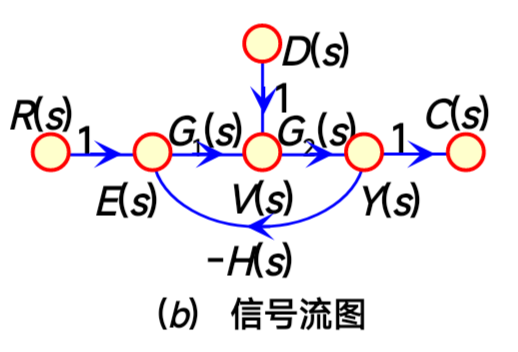 |
4.4 梅森增益公式 (Mason's Gain Formula)
梅森增益公式提供了一种直接从信号流图计算系统总传递函数 的方法,特别是在系统有多个前向通路和多个反馈回路时,它比化简方框图更高效。
公式如下:
1. :第 条前向通路的增益
是从输入节点到输出节点的第 条前向通路上的所有支路增益的乘积。一个系统可能有多条前向通路()。
2. :系统的特征式 (Determinant)
是信号流图的特征式,它由系统所有的回路增益决定。
- :所有单个回路增益的总和。
- :所有可能的两两不接触的回路增益乘积的总和。
- :所有可能的三个三个不接触的回路增益乘积的总和。
- 以此类推...
3. : 的余因子式
是为第 条前向通路 计算的特征式。其计算方法与 相同,但有一个关键区别:在计算中只考虑那些与前向通路 完全不接触(即没有任何共同节点)的回路。
换句话说,计算 时,你需要:
- 从 的表达式开始。
- 移除(设为0)所有与 接触(即共享至少一个节点)的回路增益项。
- 剩下的部分就是 。
如果 接触了系统中的所有回路,那么 。
计算步骤(Step-by-Step)
使用梅森增益公式的步骤如下:
- 识别所有前向通路: 找出所有从输入到输出的路径,并计算它们的增益 。
- 识别所有回路: 找出系统中所有的独立回路,并计算它们的增益 。
- 识别不接触回路: 找出所有互不接触的回路对、回路三元组等,并计算它们的增益乘积(如 , 等)。
- 计算 : 使用步骤2和3的结果,代入 来计算总特征式。
- 计算 : 对于每一条前向通路 ,找出所有与 不接触的回路,并使用它们来计算 。
- 代入公式: 将所有 和 以及 代入 得到最终的传递函数。
5.线性系统的时域分析法
时域分析法: 直接求出系统随时间变化的规律,并以此评价系统的性能
- 目的:我们给系统一个特定的输入信号 ,然后观察并分析系统的输出信号 是如何随时间 变化的 。
- 分析内容:这包括分析系统的稳定性(输出是否收敛)、快速性(响应速度有多快)和准确性(输出能否精确跟踪输入)。
- 典型输入信号:为了方便分析和比较不同系统的性能,我们通常会使用几种标准的测试信号:
- 脉冲信号 (Impulse Signal) :模拟瞬间的冲击。
- 阶跃信号 (Step Signal) :模拟突然的、持续的输入,如开关合上。
- 斜坡信号 (Ramp Signal):模拟等速变化的输入。
- 正弦信号 (Sinusoidal Signal) :分析系统对周期性信号的响应。
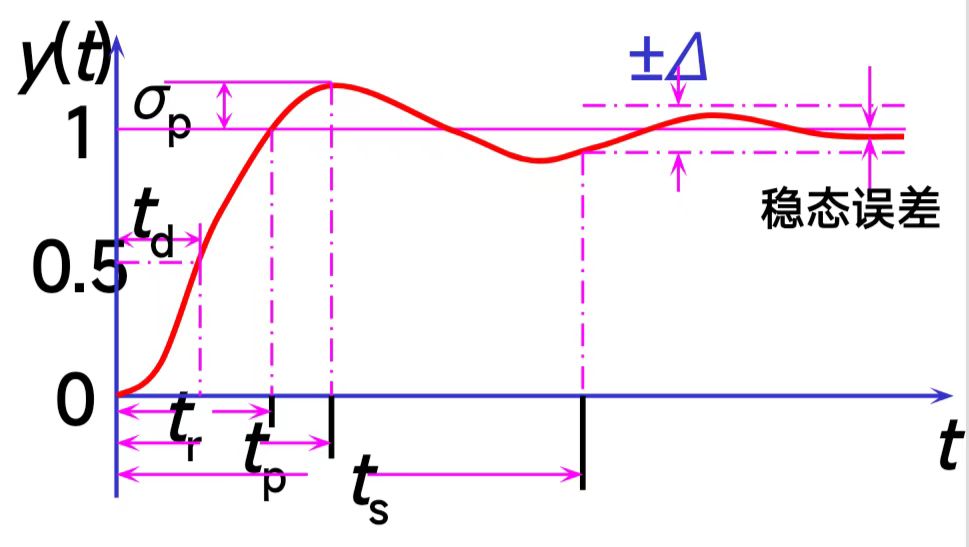
5.1动态和稳态性能指标
动态性能指标
-
延迟时间()
- 定义:响应曲线第一次到达其终值一半的时间。
-
上升时间 (Rise Time, )
- 定义:响应曲线第一次从最终值的 10% 上升到 90%(或 0% 到 100%)所需要的时间。
- 意义: 越短,表明系统的响应速度越快。
-
峰值时间 (Peak Time, )
- 定义:响应曲线从开始到第一次达到最大峰值所需要的时间。
- 意义: 也是衡量响应速度的指标之一。
-
最大超调量 (Percentage Overshoot, )
- 定义:响应曲线的最大峰值 超出其最终稳态值 的部分,与稳态值的百分比。
- 公式:
- 意义: 越小,系统的平稳性越好(振荡越小)。它是衡量系统相对稳定性的一个重要指标。
-
调节时间 (Settling Time, )
- 定义:响应曲线进入并永久保持在其稳态值 内(通常是 或 )所需的最短时间。
- 意义: 越短,表明系统过渡过程(包括振荡)消失得越快,系统越快达到稳定。
-
震荡次数()
- 定义:在内阶跃响应曲线穿越稳态值次数的一半为震荡次数。
参考如图所示:
稳态性能指标
稳态误差 (Steady-State Error) 是指系统进入稳态后,期望的输入信号 与实际的输出信号 之间的差值。
-
时域定义: (在您的课件中,这个误差信号被表示为 )
-
复频域计算 (终值定理): 在实际分析中,我们通常使用拉普拉斯变换的终值定理来计算稳态误差,这更为简便: 其中 是误差信号 的拉普拉斯变换。
5.2 一阶系统的时域分析
一阶系统(First-Order System)是指其动态特性可以用一阶微分方程来描述的系统。
微分方程:
-
传递函数:其最常见的形式是惯性环节,闭环传递函数为: 可以用来计算: 这个系统在 s 平面上有一个极点
P = -1/T。 -
核心参数:时间常数
是时间常数,它是一阶系统最重要的性能指标,量纲为时间(秒)。 决定了系统响应的快慢。
(a) 一阶系统的单位脉冲响应
- 输入:单位脉冲信号 ,其拉普拉斯变换 。
- 输出 。
- 时域响应 ()。
- 物理意义:系统在受到瞬间冲击后,其响应按指数规律衰减,衰减的快慢由 决定, 越小,衰减越快。
(b) 一阶系统的单位阶跃响应
这是分析一阶系统时最常用的响应。
- 输入:单位阶跃信号 ,其拉普拉斯变换 。
- 输出 。
- 时域响应 ()。
- 响应曲线特性:这是一条从 0 逐渐上升并最终趋近于 1 的指数曲线。
- 初始值:。
- 最终值:。
- 关键时间点:
- 当 (一个时间常数) 时,响应达到 ,即达到终值的 63.2%。
- 当 时,响应达到 (86.5%)。
- 当 时,响应达到 (95%)。
- 当 时,响应达到 (98.2%)。
- 延迟时间:
- 上升时间:
- 结论: 越小,系统响应越快,达到稳态(终值)所需的时间越短。
(c) 稳态误差分析 (Steady-State Error)
-
目的:衡量系统过渡过程结束后,输出 跟随输入 的精度。
-
误差 取决于:
- 系统结构(型别)
- 输入信号类型
- 扰动信号
-
系统型别 (Type v):
- 指系统的开环传递函数 中,在 处积分环节( 因子)的个数 。
- :0 型系统
- :I 型系统
- :II 型系统
- 越高,稳态精度越强。
-
稳态误差系数 :
- 位置误差系数 (用于阶跃输入):
- 速度误差系数 (用于斜坡输入):
- 加速度误差系数 (用于抛物线输入):
-
计算总结表:
| 系统型别 (v) | 阶跃输入 | 斜坡输入 | 抛物线输入 |
|---|---|---|---|
| v = 0 | (常数) | ||
| v = 1 | (常数) | ||
| v = 2 | (常数) |
- 扰动稳态误差 :
- 分析方法类似,但此时是计算扰动 到输出 的传递函数 ,然后使用终值定理求 。
本章 题型解法总结
本章的计算题主要有以下三类,有时会结合在一起(就像您上一道例题):
题型一:求解动态性能指标
求解:
- 求闭环传递函数 。
- 使用梅森增益公式或化简方框图。
- 求特征方程 (即 的分母)。
- 判断系统阶数:
- 如果 是二阶:
- 将其与标准型 对比。
- 解出 和 。
- 代入公式:
- (取 5% 误差带) 或 (取 2% 误差带)
- 如果 是高阶:
- (考试中)通常会告知你可以近似为二阶系统,或者题目本身会包含零极点对消,使其降阶为二阶。
- 如果无法降阶,则无法直接使用二阶公式。
- 如果 是二阶:
题型二:判断系统稳定性 (劳斯判据)
- 求特征方程 。
- 注意:这里用的是开环 来求闭环特征方程。
- 整理方程:将 整理为 的多项式形式。
- 建立劳斯表。
- 分析第一列:
- 问题:“判断系统是否稳定?”
- 解法:检查第一列是否全为正。是,则稳定;否,则不稳定。
- 问题:“求系统稳定时 的取值范围?”
- 解法:劳斯表中包含 的项,对第一列所有项建立不等式 ,解出 的公共范围。
- 问题:“求系统临界稳定时的 值和振荡频率?”
- 解法:令劳斯表某一行( 行)为 0,解出 值(即 )。再利用 行的上一行( 行)建立辅助方程 ,解出的 即为振荡频率。
- 问题:“判断系统是否稳定?”
题型三:求解稳态误差 ()
- 确定输入信号:是阶跃(位置)、斜坡(速度)还是抛物线(加速度)。
- 确定系统型别 :
- 找出系统的开环传递函数 (在单位反馈中即为 )。
- 看 中 在分母上的次数 。
- 选择对应公式:
- v=0,阶跃输入:
- v=1,斜坡输入:
- v=2,抛物线输入:
- (如果型别 大于输入信号的阶次, 恒为 0;如果 小于输入信号阶次, 恒为 )。
- v=0,阶跃输入:
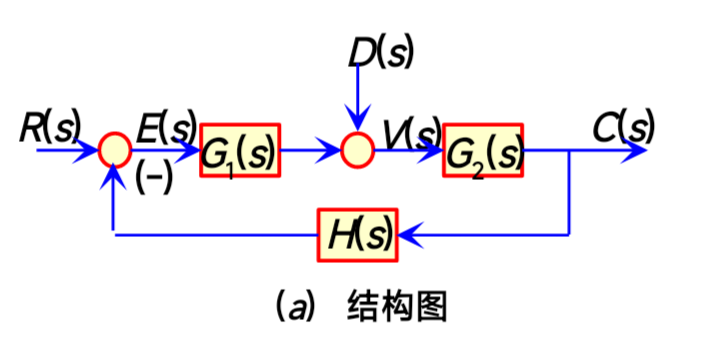
我们以上一题中出现过的这个标准负反馈方框图为例 :
- :输入
- :输出
- :前向通道传递函数
- :反馈通道传递函数
下面我们来逐一分解您提到的几个概念:
1. 核心定义
a) 和
- 是从误差信号 到输出 的传递函数(包含了控制器和被控对象)。
- 是从输出 反馈到求和点的传递函数(通常是传感器)。
- 关系:它们是系统的基本组成部分。
b) 开环传递函数 (Open-Loop Transfer Function)
- 是什么? 就是 。
- 物理意义:想象一下,我们在 处的输入断开(),然后在求和点将反馈回路“剪断”,从 处测量信号。开环传递函数就是反馈信号 与误差信号 之间的比值:。
- 用途:它不代表系统的最终输出! 它的作用是用来分析系统的稳态性能和**(在频域中)分析稳定性**。
- 稳态误差:我们用 来确定系统的型别 (Type),并计算稳态误差系数 。
- 稳定性分析:在第4、5章中,奈奎斯特图、伯德图都是画的 的曲线。
c) 闭环传递函数 (Closed-Loop Transfer Function)
- 是什么? 整个系统从输入 到输出 的总传递函数 。
- 公式:对于这个负反馈系统,它等于:
- 用途:它代表了系统的整体特性。
- 求输出:当给定一个输入 (如阶跃信号 ),系统的实际输出 。
- 动态性能:系统的超调量、调节时间等动态指标,是由这个函数的特性决定的。
d) 特征方程 (Characteristic Equation)
- 是什么? 它是闭环传递函数的分母置为 0。
- 公式:
- 关系:
- 它是 (开环)和 (闭环)之间的桥梁。
- 它的根( 的解)被称为系统的闭环极点。
- 用途:系统的所有“内禀”特性(动态性能和稳定性)都由它决定!
- 稳定性:判断系统稳定,就是判断 的所有根(闭环极点)是否都在 S 平面的左半边。劳斯判据 (Routh-Hurwitz) 就是直接分析这个方程的系数。
- 动态性能:二阶系统的 和 就是通过将 与标准型 对比得来的。
2. 关系总结与做题指南 (重要)
您会混淆,是因为在做不同类型的题目时,我们用了不同的函数。请记住这个指南:
“如果题目问我...”
1. “...系统的稳态误差 是多少?”
- 用谁? 开环传递函数 。
- 怎么做?
- 求出 。
- 根据 在 处 的幂次,确定系统型别 。
- 根据输入信号(阶跃、斜坡)和 的值,求 。
- 用 或 等公式计算。
2. “...系统的稳定性如何? (K的取值范围)”
- 用谁? 特征方程 。
- 怎么做?
- 求出 。
- 写出特征方程 ,并将其通分,整理成一个 的多项式 。
- 对这个多项式使用劳斯判据,分析第一列的符号,来判断稳定性或 的范围。
3. “...系统的动态性能指标 () 是多少?”
- 用谁? 特征方程 。
- 怎么做?
- 写出特征方程 并整理。
- (题目通常是二阶,或可近似为二阶)将其与标准形式 对比。
- 解出 和 。
- 代入 和 的公式进行计算。
4. “...系统在某输入 下的输出 是什么?”
- 用谁? 闭环传递函数 。
- 怎么做?
- 先求 和 。
- 代入公式求出 。
- 。
总结:
- 开环 :用来分析稳态误差。
- 特征方程 :用来分析稳定性和动态性能。
- 闭环 :用来求系统总输出。
二阶系统单位阶跃响应性能指标笔记
1. 标准形式
闭环传递函数: 其中: 为阻尼比, 为自然频率。
2. 阻尼状态分类
| 阻尼比 | 状态 | 极点分布 | 响应特征 |
|---|---|---|---|
| 无阻尼 | 互为共轭虚根 | 等幅振荡() | |
| 欠阻尼 | 互为共轭复根 | 衰减振荡 (考试重点) | |
| 临界阻尼 | 相等实根 | 无超调,最快单调上升 | |
| 过阻尼 | 不等实根 | 无超调,反应迟钝 |
3. 欠阻尼系统关键参数
- 衰减系数: (决定收敛快慢)
- 阻尼振荡频率: (实际振荡频率)
- 阻尼角:
4. 动态性能指标公式 (必背)
(1) 上升时间
输出第一次达到稳态值 1 的时间。
(2) 峰值时间
输出达到第一个峰值的时间。
(3) 超调量
(4) 调节时间
- 5% 误差带:
- 2% 误差带:
5. 极点位置与性能的关系
- 实部 ():决定调节时间 (离虚轴越远越快)。
- 虚部 ():决定振荡频率(离实轴越远频率越高)。
- 辐角 ():决定超调量(角度越小, 越大,超调越小)。
稳态误差
1. 给定输入作用下的稳态误差 (输入 R(s))
判断依据:看整个开环传递函数 的系统型别 (分母中单独 的个数)。
| 系统型别 | 阶跃输入 | 斜坡输入 | 加速度输入 |
|---|---|---|---|
| 0 型系统 () | |||
| I 型系统 () | |||
| II 型系统 () |
静态误差系数公式:
- 位置误差系数: (仅限0型)
- 速度误差系数: (仅限I型)
- 加速度误差系数: (仅限II型)
2. 扰动输入作用下的稳态误差 (扰动 N(s))
判断依据:看扰动作用点之前的前向通路 中积分环节的个数 。 关键定义: 为扰动作用点之前的开环增益。
| 扰动前型别 () | 阶跃扰动 | 斜坡扰动 | 加速度扰动 |
|---|---|---|---|
| 0 型 () | |||
| I 型 () | |||
| II 型 () |
3. 核心记忆口诀
- 输入看整体:整个开环积分环节越多,能消除的输入误差阶次越高。
- 扰动看前面:只有扰动点前面的积分环节(门卫),才能消除扰动带来的稳态误差。如果积分在扰动后面,对消除常值扰动无效。
- 系数对应:
- 阶跃对应 (或 )
- 斜坡对应
- 加速度对应
- 公式形式基本都是 (除了0型阶跃是 )。
根轨迹绘图法则与参数计算
1. 基础法则
- 起点:开环极点 ()。
- 终点:开环零点 () 或无穷远处。
- 分支数:等于开环极点数 。
- 对称性:关于实轴对称。
- 实轴法则:右侧开环零极点总数为奇数的区域。
2. 关键参数计算公式
(1) 渐近线 (Asymptotes)
当 时存在。
- 交点 (重心):
- 倾角:
- :
- :
- :
(2) 分离点与汇合点 (Break points)
实数轴上的重根点。
- 通用条件:
- 速算公式: (即:到所有极点距离倒数之和 = 到所有零点距离倒数之和)
- 注意:解出的 必须位于实轴根轨迹区域内才有效。
(3) 与虚轴交点
- 方法 A:劳斯判据,令某行全为 0,求临界 ,用辅助方程求 。
- 方法 B:令 代入特征方程,实部虚部双双为 0。
(4) 出射角与入射角 (相角条件)
用于复数极点/零点。
- 出射角 (极点):
- 入射角 (零点):
(5) 根之和 (Vieta's Formulas)
如果 ,则闭环极点之和为常数: (意味着当某些根向左跑,一定有其他根向右跑)
3. 模值条件 (求某点对应的 K)
根轨迹上任意一点 对应的增益 :
频域分析:伯德图绘制速查
1. 准备工作:标准形式
- 必须将常数项化为 1,提取出的系数归入 。
- 频率坐标: 轴是拉长的对数坐标。
- 幅值坐标: (dB)。
2. 典型环节绘制表
| 环节 | 转折频率 | 幅频斜率变化 | 相位极限变化 |
|---|---|---|---|
| 常数 | 无 | 0 | () 或 |
| 积分 | 无 | 全程 | 恒定 |
| 微分 | 无 | 全程 | 恒定 |
| 一阶极点 | -20 dB/dec | ||
| 一阶零点 | +20 dB/dec | ||
| 二阶极点 | -40 dB/dec |
3. 快速手绘流程 (渐近线法)
- 标出转折频率:在横轴上标出所有 和 ,按从小到大排序。
- 确定低频起点:
- 过点 。
- 画一条斜率为 dB/dec 的直线。
- 注:如果 处于某转折频率之后,需反向延长确定起点。
- 逐段作图:
- 向高频延伸,每遇到一个极点转折频率,斜率 减 20。
- 每遇到一个零点转折频率,斜率 加 20。
- 修正:
- 一阶环节在转折频率处,实际值比渐近线低(极点)或高(零点) 3dB。
- 二阶环节在 处可能有谐振峰 ()。
4. 稳定性判据 (重点)
- 穿越频率 :幅值 穿过 0dB 线的频率。
- 相位裕度 (PM):
- 若 ,系统闭环稳定。
- 工程推荐:。
频域分析:奈氏图 (Nyquist Plot) 绘制速查
1. 核心思想
奈氏图是频率特性 在复平面上的极坐标轨迹 ()。
2. 绘制三要素
(1) 起点 () —— 看系统型别
| 型别 | 起点位置 | 相角 |
|---|---|---|
| 0 型 | 实轴 处 | |
| I 型 | 虚轴无穷远处 | (渐近线 ) |
| II 型 | 实轴无穷远处 |
(2) 终点 () —— 看相对阶数 所有物理系统终点均趋向于原点。
- 进入角度:
- : 沿 (负虚轴) 进
- : 沿 (负实轴) 进
- : 沿 (正虚轴) 进
(3) 关键交点
- 与负实轴交点:令 ,求出 ,代入得 。
- 此点用于判断稳定性(看是否越过 -1)。
- 与虚轴交点:令 。
3. 常见形状速记 (设 )
- 一阶惯性 :以 为圆心,半径 的半圆 (第四象限)。
- 积分+惯性 :从 无穷远出发,直线冲向原点 (始终在 )。
- 三阶系统 :从 无穷远出发,绕过第三象限,穿过负实轴,在第二象限进原点。
4. 稳定性判据 (Nyquist Criterion)
- P: 开环右半平面极点数 (通常为0)。
- N: 曲线逆时针包围 点的圈数。
- Z: 闭环右半平面极点数。
- 结论:若 ,则闭环稳定。
频域稳定判据速查
1. 奈奎斯特判据 (Nyquist Criterion)
通用公式:
- Z: 闭环右极点数 (必须为 0 才稳定)。
- P: 开环右极点数 (通常已知,多为 0)。
- N: 曲线逆时针包围 的圈数。
常用推论 (当 时):
- 若奈氏图不包围 ,则闭环稳定。
- 若奈氏图顺时针包围 ,则闭环不稳定。
- 若曲线恰好穿过 ,则临界稳定。
2. 对数稳定判据 (Bode Criterion)
(仅适用于最小相位系统,即 P=0)
关键频率定义
- 截止频率 : (幅值穿过零分贝线)
- 穿越频率 : (相位穿过-180度线)
稳定性裕度计算 (必考)
系统稳定的充要条件:同时满足 PM > 0 和 GM > 0。
(1) 相位裕度 (Phase Margin, ) 考察点:
- 含义:在幅值降为 1 (0dB) 时,相位距离 -180° 还有多少“余额”。
- 标准: 稳定。工程推荐 左右。
(2) 幅值裕度 (Gain Margin, 或 ) 考察点:
- 含义:在相位反向 (-180°) 时,幅值衰减到了 0dB 以下多少。
- 标准: 稳定。工程推荐 。
3. 快速判断口诀
在伯德图上:
- 稳定: 在 的左边 ()。 (先没劲儿,后反向)
- 不稳定: 在 的右边 ()。 (反向了还有劲儿)
频域分析:裕度计算速查 (PM & GM)
1. 核心定义
- 截止频率 :满足 (0dB) 的频率。
- 穿越频率 :满足 的频率。
2. 计算流程表
| 步骤 | 相位裕度 (PM) | 幅值裕度 (GM) |
|---|---|---|
| Step 1 | 找 :令 解方程 | 找 :令 解方程 |
| Step 2 | 算相角: | 算幅值: |
| Step 3 | 求裕度: | 求裕度: 或 |
| 判据 | 则稳定 | () 则稳定 |
3. 常见系统相角公式
- 积分环节 :
- 惯性环节 :
- 一阶微分 :
- 延迟环节 : (注意单位换算)
4. 考试解题模板
- 写出 的幅值表达式和相角表达式。
- 列出方程 求 。
- 代入 计算。
- (若需要) 列出 求 。
- 代入 计算。
频域校正:串联超前与滞后校正
1. 串联超前校正 (Lead) —— "提速增稳"
传递函数:
- 零极分布:零点 靠近原点,极点 远离原点。
- 核心公式 (根据所需相位裕度求 ):
- 设计点:最大相位频率 需对准新的截止频率。
- 特点:带宽 ,响应速度 ,调节时间 ,抗噪性 。
2. 串联滞后校正 (Lag) —— "降速提精"
传递函数:
- 零极分布:极点 靠近原点 (利用高增益),零点 稍远。
- 核心机理: 利用高频段幅值衰减 ,使截止频率 左移(降低),利用系统低频段本身较好的相位储备。
- 设计原则: 零点 选在 的 0.1 倍处 (),以避免相位滞后副作用。
- 特点:带宽 ,响应速度 ,稳态误差 (精度高),抗噪性 。
3. 简单口诀
- 超前:零点在前,相位向上拱,系统跑得快。
- 滞后:极点在前,增益往下拉,系统这就稳。# 非线性系统分析速查
1. 核心特征
- 不满足叠加原理。
- 稳定性取决于输入信号的大小和初始条件。
- 特有现象:自激振荡 (极限环)、频率畸变、跳跃谐振。
2. 典型非线性环节
- 饱和: (大信号增益下降)。
- 死区:小信号无输出,大信号才有增益。
- 继电器:只有 两种输出 (导致恒幅振荡)。
3. 描述函数法 (Describing Function)
前提:线性部分具有低通滤波特性 (滤除高频谐波)。
定义:
- 是输入幅值 的函数。
稳定性判据 ( 与 的关系) 令 。
- 相交:存在自激振荡的可能性。
- 判断极限环稳定性:
- 沿着 增加的方向,如果在交点处, 曲线从 的不稳定区域(包围区) 进入 稳定区域(非包围区),则该极限环是稳定的 (即物理上存在的自激振荡)。
- 反之则不稳定。
4. 记忆口诀
- 饱和特性:限制了无穷大,让不稳定变稳定 (抑制发散)。
- 死区特性:小了不动,大了才动,容易导致定位误差。
- 判振荡:画出奈氏图 ,画出负倒 ,相交就有环,穿出即为稳。
自动控制原理:期末/考研高频考点手册 (核心总结版)
第一章:控制系统导论 (分值:10分)
- 重点技能:根据物理原理图绘制方块图。
- 核心记忆点:
- 明确识别:输入量、输出量、控制器、执行机构、控制对象、反馈元件。
- 注意比较点的符号,通常情况下系统默认为负反馈。
第二章:数学模型 (分值:15分)
- 重点技能:熟练运用梅森增益公式 (Mason's Formula) 求解传递函数。
- 核心公式:
- 关键步骤:准确识别所有前向通路 、所有回路 (Loop) 以及两两不相交回路。
第三章:时域分析 (分值:20分)
- 重点技能:一阶、二阶系统性能指标的定量计算。
- 二阶系统标准形式:
- 核心指标:
- 超调量 :仅与阻尼比 相关。
- 调节时间 :误差带为 时 ;误差带为 时 。
- 稳态误差 :掌握终值定理,区分位置、速度、加速度误差系数。
第四章:根轨迹分析 (分值:20分)
- 重点技能:根轨迹绘制步骤与系统参数分析。
- 核心法则:
- 起点/终点:从开环极点出发,终止于开环零点。
- 实轴法则:实轴上轨迹段右侧的零极点总数必须为奇数。
- 分离点方程:
- 临界稳定性:通过 代入特征方程计算轨迹与虚轴的交点。
第五、六章:频域分析与校正 (分值:25分)
- 重点技能:伯德图绘制、奈氏判据与系统校正。
- 核心知识点:
- 裕量判断:相位裕度 (PM) 和 幅值裕度 (GM) 是判定闭环稳定性的核心指标。
- 奈奎斯特稳定性判据:
- 串联校正:
- 超前校正:主要用于提高系统响应速度及增加相位裕度。
- 滞后校正:主要用于提高系统稳态精度,抑制高频噪声。
第八章:非线性系统分析 (分值:10分)
- 重点技能:使用描述函数法判定系统稳定性。
- 自振判定条件:
- 特征方程满足:
- 图形表现:线性部分奈氏曲线 与负倒描述函数曲线 产生交点。
matlab实验记录
keil的学习使用
因为感觉keil的使用过于麻烦,故建立一个文档作为学习备忘
目录
- keil的学习使用
📘 Keil MDK (μVision) 学习指南:从入门到 STM32 实战
第一部分:基础知识 - 你的“大脑”和“工具”
在开始之前,我们先弄清楚几个基本概念:
1. 什么是 MCU?
MCU (Microcontroller Unit, 微控制器单元),你可以把它想象成一个“微型电脑”。
- 与电脑 CPU 的区别:你电脑的 CPU (如 Intel i7) 非常强大,但它需要外部的内存、硬盘、显卡才能工作。
- MCU 的特点:MCU 把 CPU 核心、内存 (RAM)、存储 (Flash/ROM)、以及各种“工具”(外设都集成到了一块芯片上。
STM32 就是意法半导体 (ST) 公司生产的一个非常流行的 MCU 系列。
2. MCU 架构 (ARM Cortex-M)
“架构”就像是这个“微型电脑”的设计蓝图。
- 8051 架构:你可能听说过 51 单片机,它使用的是经典的 8051 架构。这是个 8 位架构,就像一个一次只能处理 8 个数据(比如 0-255)的小工人。
- ARM Cortex-M 架构:几乎所有的 STM32 芯片都使用 ARM 公司的 Cortex-M 内核。
- 32 位架构:它是一个 32 位的 RISC (精简指令集) 内核。就像一个一次能处理 32 位数据(一个非常大的数)的强壮工人,效率远超 8051。
- 标准化:ARM 只设计这个“大脑”(CPU 核心),然后卖给不同的芯片厂商(如 ST、NXP、TI)。
- ST 的角色:ST 拿来 ARM 的“大脑”,然后给它配上 ST 自己设计的“手脚和工具”(即外设 Peripherals),比如:
- GPIO:控制引脚高低电平,用来点灯、读按键。
- UART:用于串口通信(和电脑的 USB 转串口模块通信)。
- SPI / I2C:用于和其他芯片(如传感器)通信。
- Timers:定时器,用于精确计时或输出 PWM 波(控制舵机、电机)。
3. 什么是 Keil MDK?
Keil MDK (Microcontroller Development Kit) 就是你用来开发 STM32 的“集成开发环境”(IDE)。
它主要包含几个功能:
- 编辑器 (μVision IDE):你写 C 语言代码的地方。
- 编译器 (ARM Compiler):把你写的 C 语言“翻译”成 STM32 (ARM 内核) 能看懂的机器码。
- 调试器 (Debugger):连接你的下载器 (如 ST-LINK),让你可以在芯片运行时,实时查看变量、内存,或者让程序单步运行。
第二部分:准备工作 - 安装你的“工具箱”
1. 下载和安装 Keil MDK
- 官方网站:前往 ARM Keil 官网 (https://www.keil.com/demo/eval/arm.htm) 下载 MDK-Arm。
- 版本:下载最新版 MDK v5 即可。
- 许可证:Keil MDK 是收费软件,但提供了免费的评估版。评估版功能齐全,唯一的限制是编译出来的代码不能超过 32KB。对于学习 STM32F103 或 F4 系列的入门项目来说,32KB 已经足够用了。
2. 安装芯片支持包 (Pack Installer)
安装完 Keil 后,它还“不认识”STM32。你需要给它装“驱动包”。
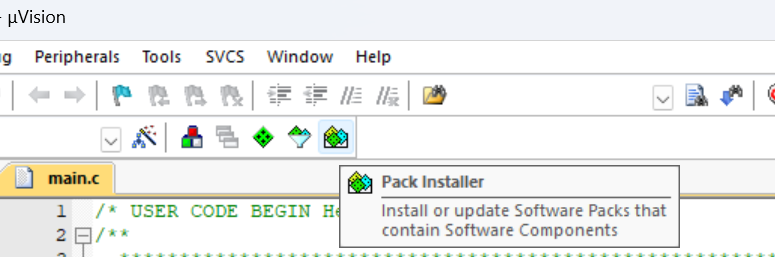
- 打开 Keil MDK (μVision)。
- 点击菜单栏的 "Pack Installer" 图标(一个带向下箭头的盒子)。
- 在左侧列表中,找到
STMicroelectronics->STM32F1xx Series(如果你用 F103) 或STM32F4xx Series(如果你用 F407)。 - 在右侧,找到
Keil::STM32F1xx_DFP或Keil::STM32F4xx_DFP。点击它旁边的 "Install" 按钮。 - 同时,确保
ARM::CMSIS这个核心包也已经安装 (Install)。
3. 安装 STM32CubeMX
在 MDK v5 时代,我们强烈不推荐手动配置 STM32 的寄存器或使用旧的“标准库 (SPL)”。
STM32CubeMX 是 ST 官方推出的图形化配置工具。你只需要在图形界面上点几下鼠标(比如 "把 PA5 引脚设置成推挽输出"),它就能自动生成 Keil MDK 项目所需的全部初始化代码 (HAL 库)。
- 下载地址:前往 ST 官网 (https://www.st.com/en/development-tools/stm32cubemx.html) 下载。它需要 Java 环境。
4. 准备硬件
- 一块 STM32 开发板(如 STM32F103C8T6 最小系统板,或 STM32F407 探索者/战舰)。
- 一个 ST-LINK V2 下载/调试器。
- 杜邦线和 LED(如果你的板子没有自带 LED)。
第三部分:现代 STM32 开发流程 (CubeMX + Keil)
这是目前最高效、最标准的入门流程。
步骤 1:在 STM32CubeMX 中创建项目
- 打开 STM32CubeMX。
- Access to MCU Selector:选择你的芯片型号,比如
STM32F103C8T6。 - Pinout & Configuration (引脚配置):
- SYS:在
Debug选项中,选择Serial Wire。(这一步至关重要,否则芯片只能下载一次程序!) - RCC:在
High Speed Clock (HSE)中,选择Crystal/Ceramic Resonator(使用外部晶振)。 - GPIO:找到一个连接了 LED 的引脚(比如
PC13),左键点击它,选择GPIO_Output。
- SYS:在
- Clock Configuration (时钟树配置):
- CubeMX 通常会自动帮你配置好时钟树(比如 72MHz)。你只需确保没有红色错误提示即可。
- Project Manager (项目管理):
- Project Name:给你的项目起个名字 (如
Blinky)。 - Project Location:选择一个存放项目的全英文路径。
- Toolchain / IDE:在下拉菜单中,选择
MDK-ARM。 - [重要] Code Generator (代码生成器):勾选 "Generate peripheral initialization as a pair of '.c/.h' files per peripheral" (按外设生成 .c/.h 文件),这样项目结构更清晰。
- Project Name:给你的项目起个名字 (如
- GENERATE CODE:点击右上角的 "GENERATE CODE"。
步骤 2:在 Keil MDK 中打开和编译
- 进入你刚才保存项目的文件夹 (如
Blinky)。 - 找到
MDK-ARM文件夹。 - 双击
.uvprojx后缀的文件 (如Blinky.uvprojx),Keil MDK 就会自动打开这个项目。
步骤 3:认识 Keil 界面
- [图片资源] Keil MDK 主界面: ``
- 左侧 (Project Window):这是你的项目文件树。CubeMX 已经帮你分好了组:
Application/MDK-ARM:包含启动文件startup_stm32f103c8tx.s。Application/User:这是你写代码的地方! 主要是main.c。Drivers/STM32F1xx_HAL_Driver:ST 官方的 HAL 驱动库文件。Drivers/CMSIS:ARM 的核心驱动文件。
- 中间 (Editor Window):写代码的区域。
- 下方 (Build Output Window):显示编译信息、警告和错误。
步骤 4:编写你的代码 (点亮 LED)
-
在左侧项目窗口,展开
Application/User,双击main.c打开它。 -
千万不要在
main()函数的开头写代码。 -
滚动
main.c,找到while(1)循环。 -
你会看到类似这样的注释:
/* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ -
你所有的
while循环代码都必须写在BEGIN和END注释之间! 否则,你下次用 CubeMX 重新生成代码时,你写的代码会被覆盖掉。 -
在
/* USER CODE BEGIN 3 */和/* USER CODE END 3 */之间,添加以下“点灯”代码(假设你的 LED 在 PC13 引脚):HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // 翻转 PC13 引脚电平 HAL_Delay(500); // 延时 500 毫秒HAL_GPIO_TogglePin:HAL 库函数,用于翻转引脚电平。HAL_Delay:HAL 库函数,用于毫秒级延时。
步骤 5:编译和下载
- 配置调试器 (ST-LINK):
- 点击菜单栏上的“魔术棒”图标 (Options for Target)。
- 切换到 Debug 标签页。
- 在右上角的下拉菜单中,选择 ST-Link Debugger。
- 点击旁边的 Settings 按钮:
- 在 Flash Download 标签页,勾选 Reset and Run。(这样下载完程序后芯片会自动重启运行)。
- 点击 OK 保存退出。
- 编译 (Build):
- 点击菜单栏的 "Build" 按钮(快捷键 F7)。
- 观察下方的 "Build Output" 窗口,确保最后显示 "0 Error(s), 0 Warning(s)"。
- 下载 (Download):
- 确保你的 ST-LINK 和开发板已连接好。
- 点击菜单栏的 "Load" 按钮(快捷键 F8)。
- 如果一切正常,你会看到 "Flash Download finished" 的提示。
此时,你开发板上的 LED 应该已经开始以 0.5 秒的间隔闪烁了!
第四部分:调试 (Debug) 基础
调试是 Keil 最强大的功能,也是你必须学会的技能。
- 开始调试:点击 "Build" 和 "Load" 按钮旁边的红色 'd' 图标 (Start/Stop Debug Session),或者按快捷键
Ctrl + F5。 - Keil 的界面会发生变化,进入调试视图。
- 常用调试操作:
- Run (F5):全速运行代码。
- Stop:暂停代码运行。
- Step Over (F10):单步执行。如果遇到函数,它会把函数当做一步执行完,不会跳进去。
- Step Into (F11):单步进入。如果遇到函数,它会跳进函数内部执行。
- Run to Cursor Line (Ctrl+F10):运行到你光标所在的那一行。
- Set Breakpoint (F9):在代码行号旁边点击,设置一个断点。程序运行到这里时会自动暂停。
- 常用调试窗口:
- Watch 1 / Watch 2:可以输入你的变量名(比如
a),实时查看它的值。 - Call Stack:显示函数的调用堆栈。
- (最有用) Peripherals (外设):在菜单栏
View->System Viewer中,你可以找到并打开GPIO、TIM、UART等窗口,实时查看 STM32 芯片内部寄存器的状态!
- Watch 1 / Watch 2:可以输入你的变量名(比如
第五部分:重要资源
- Keil 官方文档:(https://www.keil.com/support/man/docs/uv4/) 官方手册,非常详细。
- ST 官网:(https://www.st.com) 你需要在这里下载:
- STM32CubeMX
- STM32F103 的数据手册 (Datasheet):查看引脚定义、电气特性。
- STM32F103 的参考手册 (Reference Manual, RM):(最重要) 查看所有外设(如 GPIO, UART)的寄存器级详细说明。
- 视频教程:
- Bilibili (B 站):搜索 "STM32 Keil 教程" 或 "STM32CubeMX 教程",有海量的中文视频,比如正点原子、野火等机构的免费课程都非常好。
希望这份指南对你入门 Keil 和 STM32 有所帮助!
《运动控制系统》期末考试复习资料
目录
- 《运动控制系统》期末考试复习资料
第一章 绪论
1.1 运动的基本概念与分类
| 概念 | 说明 |
|---|---|
| 广义运动 | 机械运动、物理运动、化学运动、生物运动、社会运动 |
| 机械运动 | 物体的空间坐标随时间的变化(最基础的运动模式) |
| 运动控制系统 | 利用自动控制技术调节物体运动,使其轨迹符合要求 |
运动分类角度:
| 分类依据 | 类别 |
|---|---|
| 运动空间距离 | 局部运动、全局运动、空间运动(外太空) |
| 控制方式 | 全自主控制、半自主控制、遥控、遥操作 |
| 机构物理特性 | 刚体运动、柔性体运动、刚柔混合系统 |
| 运动参量变化程度 | 普通运动控制、伺服运动控制(高精度、快响应,是本领域研究热点) |
四个科学研究内涵: ①坐标系系统(客观描述运动)②运动学模型(驱动与末端关系)③动力学模型(驱动器如何驱动)④运动形式与机构
1.2 运动控制系统的组成
分层递阶控制结构:
| 层级 | 特点 |
|---|---|
| 上层控制器 | 计算能力强、智能程度高、知识粒度粗、响应慢 |
| 中层控制器 | 运动协调,性能居中 |
| 底层控制器 | 响应快、智能程度低、知识粒度细 |
三大核心组成部分: ①传动方式 ②感知方式(传感器+变送器+算法)③控制方式(算法+硬件)
开环 vs 闭环系统:
| 特性 | 开环 | 闭环 |
|---|---|---|
| 结构 | 简单 | 复杂 |
| 反馈 | 无 | 有(负反馈) |
| 抗干扰 | 差 | 强 |
| 精度 | 依赖元件 | 较高 |
| 稳定性问题 | 无 | 有 |
| 适用场合 | 被控量难以直接测量时 | 扰动量无法事先预计时 |
1.3 运动控制系统的性能
按目标量变化分类:
- 调节系统(恒值控制):控制量常值或缓慢变化
- 随动系统(伺服系统):控制量任意时间函数,需准确复现(更复杂)
系统三大要求: ✅ 稳定性好 ✅ 精度高 ✅ 响应快
与过程控制系统的对比:
| 方面 | 过程控制 | 运动控制 |
|---|---|---|
| 被控量变化 | 缓慢 | 剧烈 |
| 精度要求 | 较低 | 高 |
| 耦合 | 较分散 | 多变量强耦合 |
| 常用理论 | 离散控制系统 | 连续控制系统 |
第二章 运动机构分析
2.1 运动副
运动副定义: 机构中两构件互做一定相对运动的活动联接。
| 类型 | 名称 | 自由度 | 接触方式 |
|---|---|---|---|
| 低副 | 转动副(R) | 1 | 面接触 |
| 低副 | 移动副(P) | 1 | 面接触 |
| 低副 | 螺旋副(H) | 1 | 面接触 |
| 低副 | 圆柱副(C) | 2 | 面接触 |
| 低副 | 球面副(S) | 3 | 面接触 |
| 高副 | 齿轮副、凸轮副 | 1转动+1移动 | 点/线接触 |
机构自由度: 使机构具有确定运动所必须给出的独立运动数目。
2.2 运动机构分类
| 分类 | 举例 |
|---|---|
| 基座固定运动 | RRP、PPP、RPP、RRR等机械手 |
| 无基座运动 | 轮式、履带式、腿式、混合式、爬壁机构 |
| 水下运动 | 推进器、叶片旋转、身体摆动 |
| 空中运动 | 固定翼、旋翼、摆翼 |
| 随动运动 | 外骨骼机器人 |
自然稳定系统: 三轮车(自然稳定);自然不稳定系统: 两轮车(需控制)
2.3 传动机构
| 传动类型 | 特点 |
|---|---|
| 行星齿轮减速器 | 锁定不同部件获得不同传动比 |
| 谐波减速器 | 高精度、大减速比 |
| 摆线针轮减速 | - |
| 滚珠丝杠 | 将旋转运动转为直线运动,可调整间隙、预加载荷 |
| 链条传动 | 无滑动,传动力矩大,结构安装复杂 |
| 皮带传动 | 成本低、结构简单,易滑动、寿命短 |
| 多连杆机构 | 实现复杂运动轨迹 |
| 制动器 | 机械式、液压式、气压式、电磁式 |
| 联轴器 | 刚性联轴器、弹性联轴器 |
| 齿轮传动 | 平行轴、相交轴、交错轴(蜗轮蜗杆) |
2.4 机构串并联与开闭链
| 概念 | 定义 |
|---|---|
| 开链 | 末端节点不受约束,可自由运动 |
| 闭链 | 末端节点被约束,形成闭合链路 |
| 串联机构 | 任意两节点间只有唯一一条链路 |
| 并联机构 | 多个分支汇合于一个后续机构 |
2.5 运动机构性能指标
①工作范围 ②刚度 ③强度 ④定位精度 ⑤重复精度 ⑥分辨率 ⑦工作循环时间 ⑧死点 ⑨承载能力 ⑩速度
第三章 运动学和动力学建模
3.1 基本术语
| 术语 | 定义 |
|---|---|
| 运动学 | 描述机构运动中坐标变化的一组方程(不考虑力) |
| 动力学 | 描述机构运动和驱动力之间动态特性的数学方程 |
| 保守力 | 做功不因路径不同而改变(如重力) |
| 非保守力 | 做功与路径有关(如摩擦力) |
| 完整系统 | 约束可积 |
| 非完整系统 | 约束含广义坐标导数且不可积 |
| 刚体 | 不发生变形的理想物体 |
| 柔性体 | 会发生变形的物体 |
| 广义坐标 | 描述完整系统位形的独立变量 |
常用坐标系:
- 直角坐标系(笛卡尔):适合描述平动
- 圆柱坐标系(ρ,θ,μ):适合平动+转动混合
- 球坐标系:适合平动+转动混合
- 固定坐标系:原点/轴方向不随时间变化
- 移动坐标系:原点/轴方向随时间变化
3.2 运动学建模(核心考点)
位置运动学两类问题:
- 正问题:已知关节变量 → 求手部位姿
- 逆问题(手臂解):已知手部位姿 → 求关节变量
坐标变换:
- 平动变换:P在B系 = P在H系 + 平移矢量
- 转动变换:绕X、Y、Z轴的旋转矩阵
- 复合运动:齐次矩阵(4×4)
齐次矩阵 = [旋转矩阵3×3 | 平移矢量3×1] [透视变量1×3 | 比例因子1×1]
变换顺序重要结论:
- 左乘 → 相对于静止坐标系变换
- 右乘 → 相对于运动坐标系变换
变换的封闭性: 坐标变换具有封闭性
D-H参数法: 将齐次变换分解为臂杆变换和关节变换,方便编程
雅可比矩阵 J(Θ): 建立关节速度与末端直角坐标速度之间的线性变换关系。
- 公式:v = J(Θ)·Θ̇
- 可实现从关节速度到基坐标速度的变换
3.3 动力学建模
三种建模方法:
| 方法 | 说明 |
|---|---|
| 牛顿-欧拉方程 | 面向平动(牛顿)+ 面向转动(欧拉) |
| 拉格朗日力学方程 | 保守系统:L=T-V;非保守系统需加入外力项 |
| 拉格朗日函数法 | L=T-V,对广义坐标求导 |
3.4 倒立摆案例(重点)
牛顿法建模步骤: 小车水平运动方程 + 摆体质心加速度分析(水平+垂直分量)+ 转动方程 → 联立得矩阵形式
拉格朗日法: T(动能) - V(势能) 建立Lagrange函数,对小车r和摆杆θ分别求导
线性化: 在不稳定平衡点附近令 cosθ≈1, sinθ≈θ
动力学一般形式: M(q)q̈ + C(q,q̇)q̇ + G(q) = τ
第四章 运动测量传感器
4.1 测量系统基本组成
感知分类:
- 直接感知:直接测量被控运动体参数
- 间接感知:测量相关量后转换计算
- 模拟量感知 / 数字量感知
测量系统技术指标: ①灵敏度 ②分辨率 ③精度 ④静态特性 ⑤动态特性
4.2 常用运动量传感器
| 传感器 | 原理/特点 |
|---|---|
| 旋转变压器 | 输出电压随转子转角变化;两相励磁电流产生圆形旋转磁场 |
| 感应同步器 | 两平面绕组互感随位置变化;鉴相/鉴幅两种方式 |
| 光电传感器 | 外光电效应(电子逸出)和内光电效应(电阻率变化) |
| 光电转速计 | 投射式/反射式 |
| 脉冲编码器 | 增量型(相对位置+测速测向)和绝对型(每个位置唯一) |
| 光栅 | 莫尔条纹放大原理:W=ω/θ,平均效应 |
| 磁尺 | 类似磁带录音原理 |
| 限位开关 | 直动式、滚轮式、微动式、组合式 |
| 电位计 | 变阻器分压测位移 |
编码器核心知识点:
- A、B两相相差90° → 判别正反转
- 零位脉冲 → 获取零位参考
- 循环码盘特点:相邻扇面仅一个码变化,避免"粗大误差"
4.3 避障感知
| 传感器 | 原理 | 特点/局限 |
|---|---|---|
| 红外传感器 | 红外线为介质 | 测距远,频率响应快,适合恶劣环境 |
| 超声波传感器 | 40-45kHz声波反射 | 有反射问题、噪音、交叉问题;精度与反射面角度有关 |
| 激光传感器 | 三角测量法/回波分析法 | 高方向性、高单色性、高亮度 |
| 图像传感器 | CCD/COMS | 线阵/面阵 |
超声波传感器不宜使用场合(7种): 不垂直、需小光束、需可见光斑、多风、真空、温度梯度大、需快速响应
4.4 全局运动检测
| 技术 | 说明 |
|---|---|
| GPS | 三个独立部分:空间段(24颗卫星)、地面控制段、用户设备 |
| GPS定位原理 | 对4颗卫星进行伪距测量,解4个方程得三维坐标+时间偏移 |
| 陀螺仪 | 旋转轴方向在不受外力时不变 |
| 电子罗盘 | 磁阻传感器+惠斯通电桥测量绝对方向 |
磁场测量方法: 电磁感应法、霍尔效应法、磁阻效应法
第五章 致动方式与驱动器
5.1 致动方式(重要分类)
| 致动方式 | 原理 |
|---|---|
| 静电 | 静电为能量源 |
| 电磁 | 电磁转换 |
| 相变 | 物质相变产生驱动力(如石蜡热膨胀) |
| 热机 | 热胀冷缩提供驱动力 |
| 压电效应 | 正压电效应(受力生电)/ 逆压电效应(加电场变形) |
| 形状记忆效应(SMA) | 合金变形后加热到跃变温度恢复原状 |
| 磁致伸缩 | 铁磁物质在外磁场中尺寸变化 |
| 电致动聚合物 | 电场作用下离子运动导致变形 |
| 磁流体力学(MHD) | 磁性液体兼具流动性和磁性 |
| 电流变/磁流变(ER/MR) | 电场/磁场控制悬浮液状态 |
| 生物肌肉 | 生物肌肉驱动 |
5.2 伺服电动机驱动器
对伺服电动机的基本要求: ①宽广调速范围 ②机械特性和调节特性均为线性 ③无"自转"现象 ④快速响应
直流伺服电动机:
- 分类:有刷/无刷;他励/并励/串励/复励
- 结构:定子+转子+编码器+减速器+驱动控制器
交流伺服电动机:
- 同步电动机:转子转速n与电网频率有不变关系 n=60f/p
- 永磁同步电动机(PMSM):分类方式多样(径向/轴向、内转子/外转子、表面式/内置式、矩形波/正弦波)
- 异步电动机:转子转速小于旋转磁场转速
- 三种转子结构:高电阻笼形、非磁性空心杯、铁磁性空心转子
直线电动机: 也称线性马达,控制和旋转电动机一样
驱动放大器: 控制器输出的弱电信号 → 转换为驱动电动机的强电信号;主流采用DSP作为控制核心
5.3 液压/气压驱动器
| 类型 | 工作介质 | 特点 |
|---|---|---|
| 液压驱动 | 油液 | 依靠密封容积变化传递运动,油液内部压力传递动力 |
| 气压驱动 | 压缩空气 | 进行能量和信号传递,实现生产自动化 |
5.4 特殊驱动器
- 压电陶瓷驱动器:利用逆压电效应,微位移驱动
- 形状记忆合金(SMA)驱动器:热敏性功能材料,有记忆效应
- 人工肌肉驱动器:气动肌肉(McKibbeh型),SMA气动肌肉(具有变刚度特性)
第六章 伺服电动机模型及控制策略
6.1 直流伺服电动机
工作原理: 与他励式直流电动机相同
两种控制方式:
| 方式 | 特点 |
|---|---|
| 电枢控制(常用) | 线性好、特性曲线平行、空载损耗小、电感小、响应快 |
| 励磁控制 | 低速受磁饱和限制、高速受限、电感大、响应差,只适用于小功率 |
核心公式:
- 电压平衡:Ua = Ea + IaRa
- 感应电动势:Ea = Ke·Φ·n
- 电磁转矩:T = Kt·Φ·Ia
- 转速公式:n = (Ua - IaRa) / (KeΦ)
稳态特性:
- 机械特性:控制电压恒定时,n与T的关系(线性)
- 调节特性:电磁转矩恒定时,n与Ua的关系(线性)
6.2 PWM调速原理
PWM占空比: 重要参数
- 平均电压 Uavg = (ton/T)·Ud
- 改变占空比的方法:①定宽调频法 ②调宽调频法 ③定频调宽法(最常用)
可逆PWM系统:
| 类型 | 特点 |
|---|---|
| 单极性可逆 | T型和H型,电压方向在一个周期内不变 |
| 双极性可逆 | H型,在一个PWM周期内电压极性正负变化 |
双极性平均电压公式: Uavg = (2α-1)Ud(α为占空比)
6.3 直流伺服电动机应用
- 位置控制:火花间隙控制焊枪位置
- 速度控制:偏差信号控制转速(无静差调速)
- 混合控制:火炮跟踪系统(位置+速度)、张力控制、地震磁带记录仪、温度控制
6.4 交流伺服电动机控制方式(4种)
| 控制方式 | 说明 |
|---|---|
| ①幅值控制 | 改变控制电压幅值 |
| ②相位控制 | 改变控制电压相位 |
| ③幅值-相位控制(幅相控制) | 同时改变幅值和相位 |
| ④双相控制 | 两相同时控制 |
6.5 交流异步 vs 直流伺服性能比较
| 对比项 | 直流伺服 | 交流异步伺服 |
|---|---|---|
| 机械特性 | 线性,平行曲线 | 非线性,不平行 |
| 调节特性 | 线性 | 非线性 |
| 动态响应 | 机电时间常数衡量 | 机电时间常数衡量 |
| "自转"现象 | 无 | 需注意 |
| 电刷 | 有(有刷时) | 无 |
6.6 永磁同步电动机(PMSM)
数学模型假设: 忽略铁芯饱和、不计涡流和磁滞损耗、磁场正弦分布、无阻尼绕组、各相绕组对称
三种坐标系下的模型:
| 坐标系 | 说明 |
|---|---|
| ABC静止坐标系 | 三相自然坐标系 |
| α-β静止坐标系 | 两相静止坐标系,Clarke变换 |
| d-q旋转坐标系 | 两相旋转坐标系,Park变换 |
坐标变换公式(重要):
- Clarke变换:三相→两相静止
- Park变换:两相静止→两相旋转
PMSM转矩方程: T = p[ψf·iq + (Ld-Lq)·id·iq]
- 凸装式(Ld=Lq):T = p·ψf·iq(只有永磁转矩)
- 嵌入式(Ld≠Lq):有磁阻转矩分量
PMSM控制策略:
- 恒压频比控制
- 矢量控制(磁场定向控制):转子磁链定向、定子磁链定向、气隙磁链定向、阻尼磁链定向
- 直接转矩控制(DTC)
常用电流控制方法:
- id=0控制(最简单)
- 力矩电流比最大控制
- cosφ=1控制
- 恒磁链控制
实施方案: 电流滞环控制 / 转速及电流双闭环控制
6.7 伺服电动机发展趋势
①交流化 ②全数字化 ③高性能化 ④多功能化 ⑤小型化和集成化 ⑥模块化和网络化
第七章 运动控制算法设计与仿真
7.1 运动控制对象建模
直流伺服电动机传递函数:
- 电压平衡方程(Laplace):Ua(s) = RaIa(s) + La·s·Ia(s) + Ea(s)
- 力矩平衡方程:T(s) = J·s·ω(s) + B·ω(s)
- 忽略电感La简化:G(s) = Km / (s(Tm·s+1))
- Km:电动机增益常数,Tm:电动机时间常数
运动负载类型(4种):
| 类型 | 表达式 | 举例 |
|---|---|---|
| 恒定负载 | T=常数 | 重力 |
| 与位移有关(弹性负载) | T∝φ | 弹簧 |
| 与速度有关 | 干摩擦/黏性摩擦/风阻 | 摩擦力 |
| 与加速度有关(惯性负载) | T=J·α | 转动惯量 |
7.2 常用伺服控制策略(16种)
PID控制、最优控制、自适应控制、解耦控制、重力补偿、耦合惯量及摩擦力补偿、传感器位置补偿、前馈控制、超前控制、记忆-修正控制、递阶控制、模糊控制、神经控制、鲁棒控制、滑模变结构控制、学习控制
按反馈传感器位置分类:
- 开环运动控制
- 闭环运动控制
- 半闭环运动控制
- 复合运动控制
7.3 采样定理
- 香农(Shannon)采样定理:采样频率ωs ≥ 2ωmax(不失真恢复)
- 采样周期选择因素:动态品质、被控对象动态特性、扰动信号频谱、控制算法与计算机性能
7.4 PID控制算法
连续PID: u(t) = Kp·e(t) + Ki∫e(t)dt + Kd·de(t)/dt
离散增量PID: Δu(k) = Kp·Δe(k) + Ki·e(k) + Kd·[Δe(k)-Δe(k-1)]
常用PID变种: 模糊增量PID、智能PI、位置环PIP、自适应PID、预测PID、神经元PID
7.5 滑模变结构控制(SMC)
- 基本原理:高速切换反馈控制,使系统状态沿滑模面运动
- 核心概念:切换函数(滑模面)s=0,控制律需满足到达条件 s·ṡ < 0
- 优点:对参数摄动和外部干扰具有鲁棒性
- 缺点:抖振问题
7.6 PMSM三闭环控制系统设计
三环结构: 电流环(最内层)→ 速度环 → 位置环(最外层)
设计流程:
- 电流环:PI调节器,校正为典型I型系统
- 速度环:PI调节器,校正为典型II型系统
- 位置环:P调节器,校正为典型I型系统
SVPWM(空间矢量脉宽调制): 通过电压空间矢量合成磁链轨迹
工程实施技巧: 直流母线电压纹波补偿、遇限削弱积分PI控制、抗摆动处理(变速度限幅/变P参数)、速度斜坡处理
7.7 复杂控制算法案例
| 案例 | 算法 |
|---|---|
| 双腿行走机器人 | P型开闭环迭代学习控制 |
| 仿生膝关节 | 计算力矩+PD反馈控制 |
| 倒立摆 | LQR最优控制(线性二次型),含观测器设计 |
7.8 虚拟样机联合仿真
- ADAMS(机械动力学)+ MATLAB/Simulink(控制)
- 三层次模型:几何本体模型 → 运动学动力学模型 → 控制模型
第八章 运动控制器的硬件和软件
8.1 运动控制器类型
| 类型 | 特点 |
|---|---|
| 单片机(MCU) | 最早用于运动控制器,典型的微控制器 |
| PLC | 可编程逻辑控制器,执行逻辑运算、顺序控制、定时、计数 |
| ARM | RISC指令集,32位设计,支持ARM/Thumb指令集 |
| DSP | 数字信号处理器,适合复杂算法(哈佛结构 vs 冯·诺依曼结构) |
| 专用控制器(CNC) | 用于数控机床 |
| 工控机(IPC) | 增强型PC,适合工业环境 |
| PC+运动控制卡 | 灵活组合 |
冯·诺依曼结构 vs 哈佛结构:
- 冯·诺依曼:指令和数据共用总线
- 哈佛结构:指令和数据分开存储(DSP常用),可并行读取
8.2 直流伺服电动机驱动器案例
- LMD18200:专用于直流电动机驱动的H桥组件
- 典型应用:PWM控制电机正反转
8.3 DSP全数字直流伺服控制系统
双闭环调速系统: 电流内环 + 速度外环 电流检测方法: ①电阻采样 ②电流互感器 ③磁场平衡式霍尔电流检测器 电压检测方法: ①分压电阻 ②电压互感器 ③磁场平衡式霍尔电压传感器
8.4 数控机床运动控制系统
对伺服系统的要求: ①调速范围宽 ②精度高 ③响应快 ④低速大扭矩
分类:
- 按工艺:车床、铣床、滚齿机、线切割等
- 按功能:点位控制、点位直线控制、轮廓控制
坐标系: 右手直角笛卡儿坐标系,右手螺旋法判断正方向
插补算法(重要):
| 类型 | 说明 |
|---|---|
| 脉冲增量插补 | 逐点比较法(直线插补、圆弧插补) |
| 数据采样插补 | 二阶递归法等 |
逐点比较法核心:
- 直线插补:偏差判别 → 坐标进给 → 偏差计算 → 终点判别
- 圆弧插补:F>0向-X进给,F<0向+Y进给
NC编程: G代码指令,子程序调用,M代码
8.5 工业机器人控制器
- Staubli工业机器人:编程系统+多种坐标系
- 工业焊接机器人:控制器+控制柜(内部结构包含电源、驱动器、控制板卡等)
8.6 操作系统
- 实时操作系统关键:中断及中断处理
- 任务状态转换:就绪→运行→阻塞
- iRMX中断处理过程
8.7 现场总线
| 总线类型 | 全称 |
|---|---|
| FF | 基金会现场总线 |
| Profibus | 过程现场总线 |
| HART | 可寻址远程传感器数据通路 |
| CAN | 控制局域网络(应用最广泛之一) |
| LonWorks | 局部操作网 |
CAN总线数据帧结构: 帧起始→仲裁场→控制场→数据场→CRC场→ACK场→帧结束
CAN总线应用案例: 速度跟随伺服系统、位置跟随伺服系统、增益内模控制算法
⭐ 考前重点提示
必须掌握的核心公式
- 直流电动机转速公式:n = (Ua - IaRa) / (KeΦ)
- 坐标变换齐次矩阵(4×4)
- D-H参数法
- 雅可比矩阵:v = J(Θ)·Θ̇
- PMSM转矩方程:T = p[ψf·iq + (Ld-Lq)·id·iq]
- PID控制:u(t) = Kp·e(t) + Ki∫e(t)dt + Kd·de(t)/dt
- 采样定理:fs ≥ 2fmax
- PWM平均电压:Uavg = (ton/T)·Ud
必须理解的概念对比
- 开环 vs 闭环控制系统
- 运动学正问题 vs 逆问题
- 电枢控制 vs 励磁控制
- 直流伺服 vs 交流伺服
- 增量型编码器 vs 绝对型编码器
- 串联机构 vs 并联机构
- 调节系统 vs 随动系统
- Clarke变换 vs Park变换
重要案例分析
- 倒立摆建模(牛顿法+拉格朗日法,要会推导矩阵形式)
- PMSM三闭环设计(电流环→速度环→位置环的设计顺序)
- 逐点比较法直线/圆弧插补
- 单极性/双极性PWM调速
马克思主义基本原理
大芬,我也不知道为什么这吊玩意我也搞,可能为了这盘粗包饺子
目录
导论:什么是马克思主义
学习目标:从整体上理解马克思主义的内涵、产生过程、基本特征及当代价值,树立科学的马克思主义观。
一、什么是马克思主义
1. 科学内涵
马克思主义是由马克思、恩格斯创立并为后继者所不断发展的科学理论体系。
- 研究对象:关于自然、社会和人类思维发展一般规律的学说 。
- 核心内容:关于社会主义必然代替资本主义、最终实现共产主义的学说 。
- 阶级属性:关于无产阶级解放、全人类解放和每个人自由而全面发展的学说 。
- 指导地位:无产阶级政党和社会主义国家的指导思想,指引人民创造美好生活的行动指南 。
2. 三个基本组成部分
马克思主义是一个有机统一的理论体系,主要包括三个部分 :
- 马克思主义哲学(世界观和方法论基础)
- 马克思主义政治经济学(揭示资本主义运行规律)
- 科学社会主义(核心结论和目标)
3. 马克思主义基本原理
是对马克思主义立场、观点、方法的集中概括。
- 基本立场:以无产阶级解放和全人类解放为己任,以人的自由而全面发展为美好目标,以人民为中心,坚持一切为了人民、一切依靠人民 。
- 基本观点:关于自然、社会、思维发展一般规律的科学认识(如:物质决定意识、社会存在决定社会意识、剩余价值理论、社会主义必然代替资本主义等)。
- 基本方法:建立在辩证唯物主义和历史唯物主义基础上的思想方法(如:实事求是、辩证分析、矛盾分析、历史分析、阶级分析、群众路线等)。
二、马克思主义的创立与发展
1. 产生的条件
- 社会根源:资本主义生产方式的发展,社会两极分化,周期性经济危机爆发,资本主义基本矛盾显现 。
- 阶级基础:无产阶级反抗资产阶级斗争的兴起(三大工人运动:法国里昂工人起义、英国宪章运动、德国西里西亚纺织工人起义),标志着无产阶级作为独立的政治力量登上历史舞台 。
- 思想渊源(直接理论来源):
- 德国古典哲学(黑格尔的辩证法、费尔巴哈的唯物主义)
- 英国古典政治经济学(亚当·斯密、大卫·李嘉图)
- 英法空想社会主义(圣西门、傅立叶、欧文)
- 自然科学前提:19世纪三大科学发现(细胞学说、能量守恒与转化定律、生物进化论)。
2. 创立过程中的标志性事件
- 《德法年鉴》论文(1844年):表明马克思、恩格斯完成了从唯心主义向唯物主义、从革命民主主义向共产主义的转变。
- 《德意志意识形态》(1845-1846年):首次系统阐述历史唯物主义。
- 《共产党宣言》(1848年2月):标志着马克思主义的公开问世。
- 《资本论》(1867年第一卷):系统阐述剩余价值学说。唯物史观和剩余价值学说是马克思一生的两个伟大发现。
3. 马克思主义的发展
- 列宁主义:列宁在帝国主义和无产阶级革命时代,分析了资本主义发展到帝国主义阶段的新特点,提出了“社会主义革命可能在一国或数国首先发生并取得胜利”的论断,领导了十月革命。
- 马克思主义中国化时代化:
- 毛泽东思想:马克思主义中国化的第一次历史性飞跃。
- 中国特色社会主义理论体系(邓小平理论、“三个代表”重要思想、科学发展观):实现了马克思主义中国化时代化新的飞跃]。
- 习近平新时代中国特色社会主义思想:是当代中国马克思主义、21世纪马克思主义,实现了马克思主义中国化时代化新的飞跃。
- 注:需重点掌握“两个结合”:马克思主义基本原理同中国具体实际相结合、同中华优秀传统文化相结合。
三、马克思主义的基本特征
马克思主义具有鲜明的科学性、人民性、实践性、发展性。用一句话概括就是:科学性与革命性的统一。
- 科学的理论:是对自然、社会和人类思维发展本质和规律的正确反映,以事实为依据,以规律为对象,以实践为检验标准。
- 人民的理论:人民性是马克思主义的本质属性,人民至上是政治立场。它是关于无产阶级和全人类解放的学说。
- 实践的理论:实践观点是马克思主义首要的和基本的观点。它不只解释世界,更致力于改变世界。
- 发展的理论:具有与时俱进的理论品质,不断回答时代之问、人民之问。
四、马克思主义的当代价值
- 观察当代世界变化的认识工具:提供宏大视野、锐利目光(透过现象看本质)和长远眼光。
- 指引当代中国发展的行动指南:是指引当代中国发展的精神旗帜、精神动力,是我们的“看家本领”。
- 引领人类社会进步的科学真理:世界仍然处于马克思主义所指明的从资本主义走向社会主义的大时代。
五、自觉学习和运用马克思主义
学习态度:不能采取浅尝辄止、蜻蜓点水的态度。
学习方法:
- 努力学习和掌握马克思主义的基本立场、观点、方法(这是最根本的)。
- 努力学习和掌握马克思主义中国化时代化的理论成果(特别是习近平新时代中国特色社会主义思想)。
- 坚持理论联系实际的马克思主义学风。
- 自觉将马克思主义内化于心、外化于行。
第一章 世界的物质性及发展规律
学习目标:掌握辩证唯物主义基本原理,着重把握马克思主义物质观,理解世界的物质统一性,物质与意识的辩证关系,事物联系和发展的基本规律、基本环节,坚持科学的世界观和方法论。
一、世界的多样性与物质统一性
1. 哲学基本问题
- 定义:思维和存在的关系问题(即物质和意识的关系问题)。
- 两大方面:
- 何者第一性:存在和思维谁为本原?这是划分唯物主义与唯心主义的唯一标准。
- 有无同一性:思维能否正确反映存在?这是划分可知论与不可知论的标准。
2. 物质及其存在方式
- 物质的定义:物质是标志客观实在的哲学范畴。客观实在性是物质的唯一特性。
- 物质的存在方式:
- 运动:是物质的根本属性和存在方式。物质是运动的,运动是物质的。
- 静止:是运动的特殊状态(相对静止)。运动是绝对的(无条件),静止是相对的(有条件)。
- 时空:时间(一维性/持续性)和空间(三维性/广延性)是运动着的物质的基本存在形式。
- 世界的二重化:世界分化为自然界与人类社会、客观世界与主观世界。实践是分化与统一的关键。
3. 物质与意识的辩证关系
- 物质决定意识:
- 起源:意识是自然界长期发展的产物,也是社会历史的产物(劳动起决定性作用)。
- 本质:意识是人脑的机能和属性,是客观世界的主观映象(内容是客观的,形式是主观的)。
- 意识对物质的反作用(能动作用):
- 具有目的性和计划性。
- 具有创造性。
- 具有指导实践改造客观世界的作用(这是最主要的作用,意识变为现实的途径)。
- 具有调控人的行为和生理活动的作用。
- 主观能动性与客观规律性的统一:
- 尊重客观规律是正确发挥主观能动性的前提。
- 只有充分发挥主观能动性,才能正确认识和利用客观规律。
- 实践是二者统一的基础。
4. 世界的物质统一性
- 原理:世界的统一性在于它的物质性。自然界、人类社会、人的意识在根本上都是物质的。
- 方法论:一切从实际出发,实事求是。这是马克思主义哲学的基石。
二、事物的普遍联系和变化发展
唯物辩证法的总特征:联系和发展。
1. 联系与发展
- 联系:事物内部各要素之间和事物之间相互影响、相互制约、相互作用的关系。
- 特点:客观性、普遍性、多样性、条件性。
- 发展:实质是新事物的产生和旧事物的灭亡。
- 新事物:合乎历史前进方向、具有远大前途的东西。
2. 唯物辩证法的三大规律
| 规律名称 | 地位/作用 | 核心内容 | 方法论意义 |
|---|---|---|---|
| 对立统一规律 | 根本规律、实质核心 | 揭示了事物发展的源泉和动力。矛盾的同一性与斗争性;普遍性与特殊性。 | 矛盾分析法(两点论与重点论统一;具体问题具体分析)。 |
| 量变质变规律 | 揭示了事物发展的形式和状态 | 量变(渐进、连续)与质变(飞跃、中断)的辩证关系。 | 适度原则;重视积累;抓住机遇。 |
| 否定之否定规律 | 揭示了事物发展的方向和道路 | 辩证否定(实质是“扬弃”);发展是前进性与曲折性的统一。 | 反对直线论和循环论;前途光明,道路曲折。 |
- 矛盾的精髓:矛盾的普遍性(共性)与特殊性(个性)的辩证关系。
3. 唯物辩证法的五对范畴
- 内容与形式:内容决定形式,形式反作用于内容。
- 本质与现象:本质决定现象,现象表现本质(真象/假象)。
- 原因与结果:引起与被引起的关系。
- 必然与偶然:必然性通过偶然性开辟道路;偶然性是必然性的表现形式和补充。
- 现实与可能:相互区别又相互转化。
三、唯物辩证法是认识世界和改造世界的根本方法
- 本质特征:批判的、革命的。
- 根本方法:矛盾分析法。
- 坚持“两点论”和“重点论”的统一。
- 坚持具体问题具体分析(马克思主义的活的灵魂)。
- 坚持问题导向。
- 不断增强思维能力:
- 辩证思维能力:承认矛盾、分析矛盾、解决矛盾,善于抓住关键、找准重点。
- 历史思维能力:知古鉴今,善于运用历史眼光认识发展规律。
- 系统思维能力:从事物相互联系的各个方面及其结构和功能进行系统思考(整体性)。
- 战略思维能力:高瞻远瞩、统揽全局,把握事物发展总体趋势。
- 底线思维能力:凡事从坏处准备,努力争取最好的结果。
- 创新思维能力:破除迷信、超越陈规,因时制宜、知难而进。
个人简历
 18051210856
18051210856
 2846896414@qq.com
2846896414@qq.com

 个人信息
个人信息
- 男,2005 年出生
- 求职意向:2026拓竹校园大使
 教育经历
教育经历
- 学士,南京工业大学,机器人工程专业,2023~2027
- 绩点:3.0,年级前 50
- 曾担任南京工业大学科学技术协会副部长
 技能清单
技能清单
- 熟练掌握solidworks,有自己的建模作品
- 熟练使用拓竹、创想三维、爱乐酷等多家3d打印机
- 有承办活动经验
F阶段
F2-Logisim
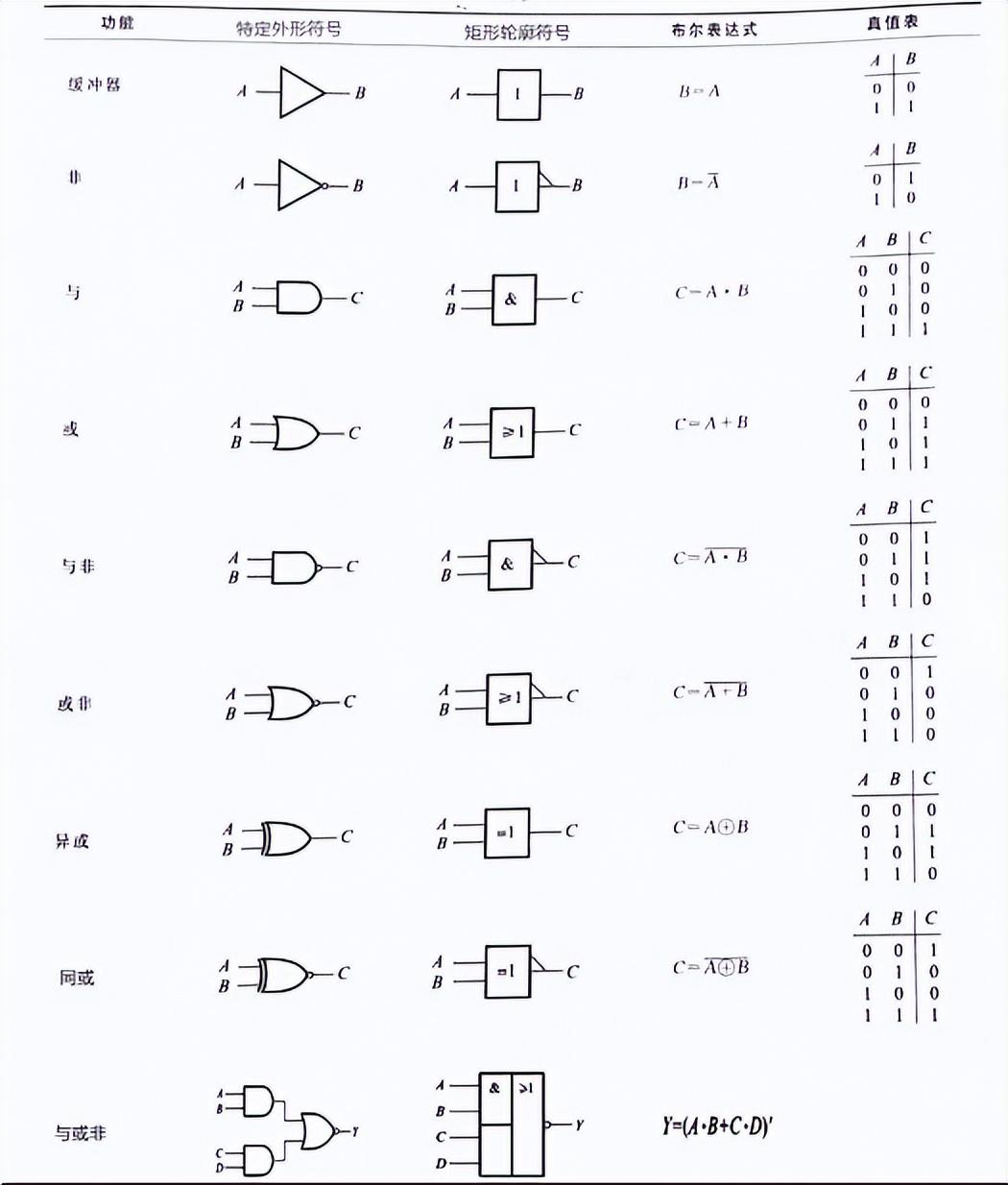
1.了解Logisim
基本逻辑门符号对照表
忘光光了,附上表格方便脑雾的时候查阅
完成的作业
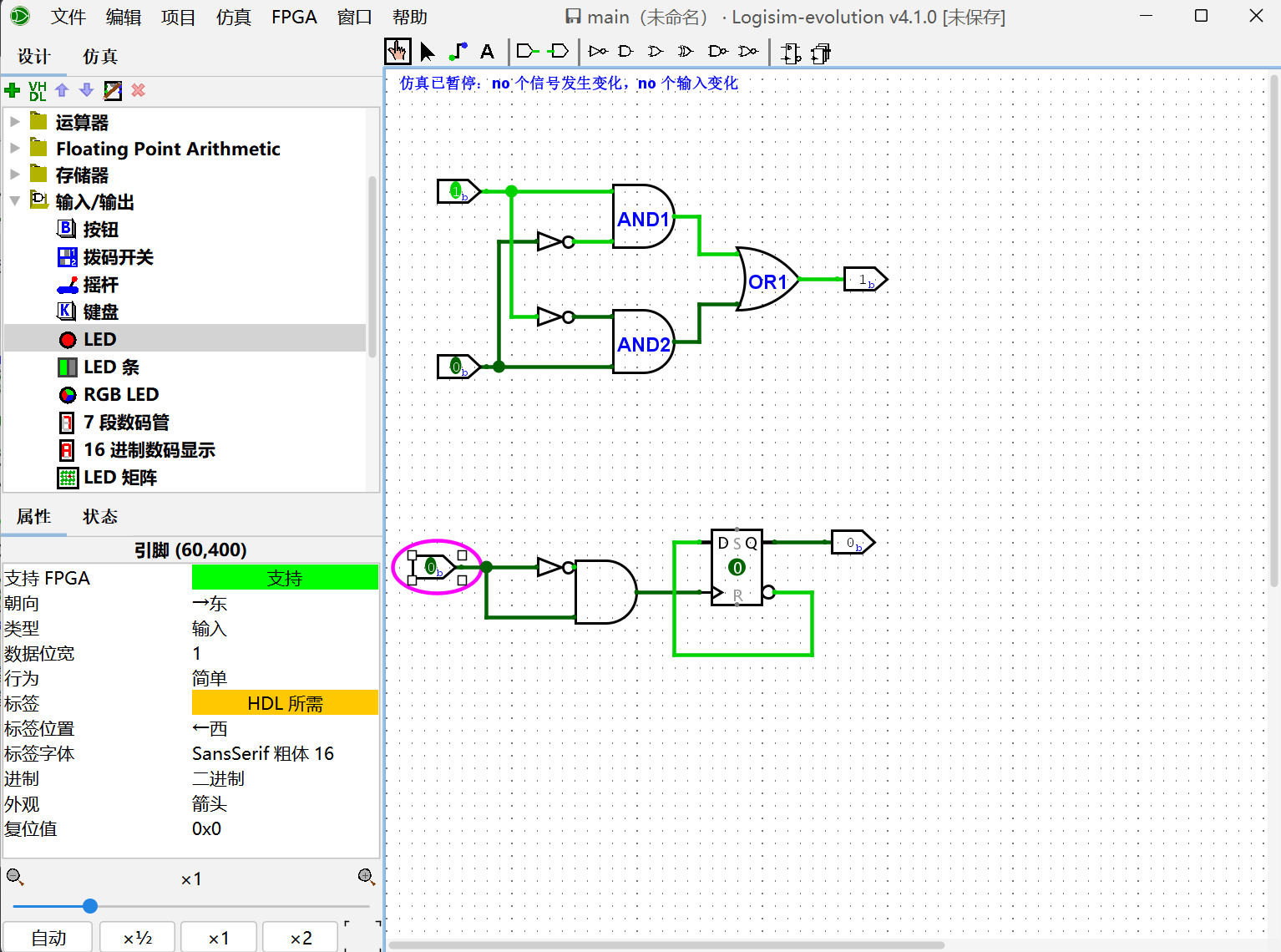
1.测试电路&单步模式
F3-数字逻辑电路基础
验证该逻辑功能:
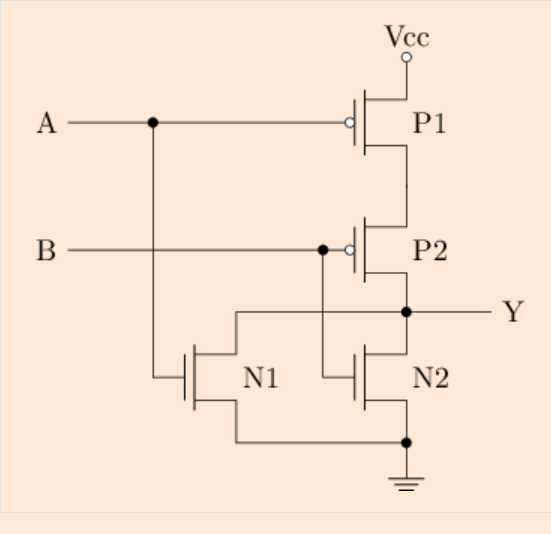
| A | B | P1 | P2 | N1 | N2 | Y |
|---|---|---|---|---|---|---|
| 0 | 0 | 通 | 通 | 关 | 关 | 1 |
| 0 | 1 | 通 | 关 | 关 | 通 | 0 |
| 1 | 0 | 关 | 通 | 通 | 关 | 0 |
| 1 | 1 | 关 | 关 | 通 | 通 | 0 |
综上可见:该电路实现或非门
若要实现或门,在上图或非门输出部分加上一个CMMOS电路即可