自动控制原理的笔记
先放在这里,如果真的开始记了就删掉这句
目录
- 自动控制原理的笔记
- 1.自动控制系统的基本控制方式
- 2.控制系统的数学模型
- 3.动态结构图的等效变换
- 4.信号流图与梅逊公式
- 5.线性系统的时域分析法
- 二阶系统单位阶跃响应性能指标笔记
- 稳态误差
- 根轨迹绘图法则与参数计算
- 频域分析:伯德图绘制速查
- 频域分析:奈氏图 (Nyquist Plot) 绘制速查
- 频域稳定判据速查
- 频域分析:裕度计算速查 (PM & GM)
- 频域校正:串联超前与滞后校正
- 自动控制原理:期末/考研高频考点手册 (核心总结版)
1.自动控制系统的基本控制方式
自动控制系统的定义:为自动达到某一目的,由相互制约的各个部分按一定规律组织成的、具有一定功能的整体。
自动控制系统的组成:控制器、被控对象、反馈环节、中间环节等。
自动控制系统基本控制方式:开环控制、闭环控制和复合控制三种。
1.1开环控制
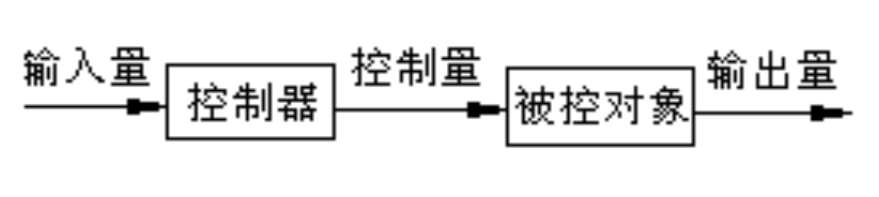
特点:控制器与被控对象之间只有正向控制作用而没有反馈作用,简单、控制精度低。
2.2闭环控制
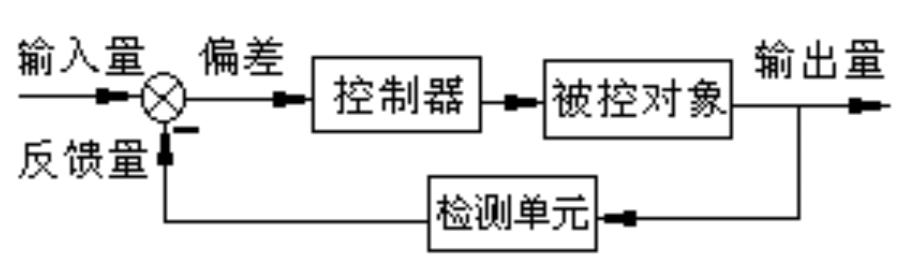
负反馈:偏差量=输入量-反馈量
特点:
- 控制精度高,稳定性好
- 对反馈设备要求高,价格贵,系统结构复杂
1.3复合控制
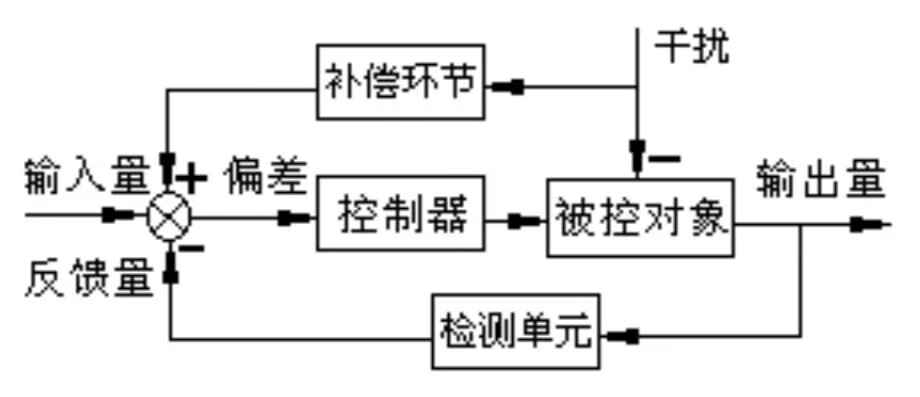
干扰补偿的开环控制和按偏差的闭环控制相结合
2.控制系统的数学模型
2.1傅里叶变换与拉普拉斯变换
为什么从傅里叶变换转向拉普拉斯变换?
在信号处理和系统分析的早期,傅里叶变换(Fourier Transform)是一个极其强大的工具。它能将一个复杂的时域信号分解成一系列不同频率的正弦波,让我们能在频域中分析信号的特性。然而,在自动控制领域,傅里-叶变换有几个关键的局限性,而拉普拉斯变换(Laplace Transform)恰好解决了这些问题。
傅里叶变换的核心局限:
-
收敛条件的严苛性:傅里叶变换要求信号在整个时间轴上是“绝对可积”的(即 )。这意味着,只有那些随着时间推移,幅值最终会衰减到零的稳定信号才能进行傅里-叶变换。但在控制系统中,我们经常会遇到两类不满足此条件的信号:
- 阶跃信号 (Step Function):例如,一个系统启动时,输入信号从0突然变为1并保持不变。这种信号显然不是绝对可积的。
- 发散信号:在一个不稳定的系统中,输出可能会随时间无限增大(如 ,其中 )。这类信号也无法进行傅里-叶变换。
-
无法分析系统稳定性:傅里叶变换主要分析的是系统的稳态响应,即系统在运行了足够长时间后,对持续输入(如正弦波)的反应。它无法直接告诉我们系统的暂态响应(系统在刚受到输入信号时的初始反应)以及系统的稳定性(系统在受到扰动后是趋于稳定还是发散)。而对于控制系统设计来说,保证稳定性是首要任务。
-
对初始条件处理不便:在解决微分方程时,系统的初始状态(如电容的初始电压、弹簧的初始位移)至关重要。傅里-叶变换在处理这些非零初始条件时非常不方便。
拉普拉斯变换的优势:
为了克服这些局限,拉普拉斯变换被引入。可以将拉普拉斯变换看作是傅里叶变换的“增强版”或“推广版”。
它的定义为:
这里的关键是复变量 。
-
引入衰减因子,放宽收敛条件:
- 中的实部 起到了一个衰减因子的作用。在积分中乘以 其中的 项可以强制一个原本发散的函数(如 )收敛。只要我们选择一个足够大的 ( ),就可以让乘积 变得绝对可积,从而保证积分能够收敛。
- 这就意味着,即便是阶跃信号、斜坡信号甚至某些指数增长的信号,只要在一定的 取值范围内,都可以进行拉普拉斯变换。这个范围被称为收敛域 (Region of Convergence, ROC)。
-
统一分析暂态与稳态,并判断稳定性:
- 复频率 所在的复平面(s平面)成为了分析系统特性的强大工具。系统的传递函数 的极点(使 变为无穷大的 值)在s平面上的位置直接决定了系统的性能。
-
方便处理初始条件:拉普拉斯变换的微分定理 ,很自然地将时域中的初始条件 包含进了频域的代数方程中,使得求解微分方程变得异常简洁。
总结一下:从傅里叶变换到拉普拉斯变换,本质上是为了将分析的信号范围从稳定的、能量有限的信号扩展到更广泛的、可能发散的、有初始条件的工程信号,并且提供了一个能够同时分析系统暂态、稳态和稳定性的统一框架。
拉普拉斯变换的本质
拉普拉斯变换的本质可以理解为:将一个定义在时域上的函数(通常是微分方程),映射到一个定义在复频域(s域)上的代数方程。
这个过程的核心思想与傅里-叶变换类似,都是一种基变换。
-
傅里叶变换:将信号分解为一系列具有不同频率 的、永不衰减的虚指数函数 (即正弦和余弦波)的线性组合。它的“基”是
-
拉普拉斯变换:将信号分解为一系列具有不同复频率 的、可能衰减或增长的虚指数函数 的线性组合。它的“基”是
这个“基”既包含了振荡特性(由 决定),也包含了衰减或增长的包络特性(由 决定)。因此,拉普拉斯变换能够描述和分析比傅里叶变换更复杂的动态行为,这正是控制系统所需要的。
一句话概括其本质:拉普拉斯变换通过一个巧妙的积分变换,将复杂的“微积分运算”(微分和积分)转换为了简单的“代数运算”(乘除和加减),极大地简化了动态系统的分析和求解过程。
拉普拉斯变换对照表
| 序号 | 原函数 (时域) f(t) | 象函数 (s域) F(s) | 说明 |
|---|---|---|---|
| 1 | 单位冲激函数 | ||
| 2 | 单位阶跃函数 | ||
| 3 | 单位斜坡函数 | ||
| 4 | (n为正整数) | 幂函数 | |
| 5 | 指数衰减函数 | ||
| 6 | |||
| 7 | (n为正整数) | ||
| 8 | 正弦函数 | ||
| 9 | 余弦函数 | ||
| 10 | 衰减正弦 | ||
| 11 | 衰减余弦 | ||
| 12 | 双曲正弦 | ||
| 13 | 双曲余弦 | ||
| 14 | 一阶系统阶跃响应 | ||
| 15 | 典型一阶惯性环节 | ||
| 16 | | 典型二阶欠阻尼系统 |
注:即1(t),通常可省略。
重要性质与定理
| 性质/定理 | 时域运算 | s域运算 |
|---|---|---|
| 线性性质 | ||
| 时移性质 | ||
| 复频移性质 | ||
| 尺度变换 | , | |
| 时域微分定理 | ||
| 时域积分定理 | ||
| s域微分定理 | ||
| s域积分定理 | ||
| 卷积定理 | ||
| 初值定理 | ||
| 终值定理 | (仅当系统稳定时) |
2.2传递函数
什么是传递函数?
1. 核心定义
传递函数是描述线性时不变 (Linear Time-Invariant, LTI) 系统动态特性的数学模型。它定义为:
在零初始条件下,系统输出信号的拉普拉斯变换与输入信号的拉普拉斯变换之比。
用数学公式表示为:
其中:
- 是传递函数。
- 是系统输出信号 的拉普拉斯变换。
- 是系统输入信号 的拉普拉斯变换。
- 是复变量,即 。
关键点解读
-
线性时不变系统 (LTI):这是传递函数应用的前提。
- 线性 (Linear):系统满足叠加原理。如果输入 产生输出 ,输入 产生输出 ,那么输入 必然产生输出 。
- 时不变 (Time-Invariant):系统的特性不随时间变化。今天对系统施加一个输入信号得到的响应,和明天施加同样的输入得到的响应,除了时间起点不同,响应的形态是完全一样的。
-
零初始条件 (Zero Initial Conditions):这是定义的另一个关键前提。在分析传递函数时,我们假设系统在输入信号作用之前处于完全静止的状态。这样做是为了将系统的响应完全归因于输入信号,从而分离出系统本身的固有特性。
-
s域模型:传递函数是定义在复频域(s域)中的,而不是时域。它把描述系统的时域微分方程转换为了s域的代数方程,极大地简化了分析和计算。
传递函数的物理意义和作用
1. 描述系统自身的固有特性
传递函数 只与系统自身的结构和参数有关,而与输入信号的形式和大小无关。你可以把传递函数想象成一个系统的“指纹”或“DNA”,它揭示了系统内部的动态规律。
2. 揭示系统的动态性能
通过分析传递函数的极点和零点来预判系统性能。
-
极点 (Poles):使传递函数 的分母多项式为零的 值。
- 极点的位置直接决定了系统的稳定性和响应模式。
- 极点在s平面的左半平面:系统是稳定的。
- 极点在s平面的虚轴上:系统处于临界稳定状态。
- 极点在s平面的右半平面:系统是不稳定的。
- 极点的位置直接决定了系统的稳定性和响应模式。
-
零点 (Zeros):使传递函数 的分子多项式为零的 值。
- 零点影响系统响应的形态和幅值,但不影响系统的稳定性。
3. 简化系统分析
- 化微分方程为代数运算:系统的总输出 就是输入 乘以传递函数 ,即 。
- 便于系统框图分析:复杂的系统中,各个组件可以用各自的传递函数表示,通过简单的框图连接规则,就能求出整个系统的总传递函数。
2.3如何求传递函数?
求传递函数通常有以下步骤:
- 建立物理模型:根据物理定律写出描述系统动态行为的微分方程。
- 进行拉普拉斯变换:对微分方程的两边进行拉普拉斯变换,假设所有初始条件为零。
- 整理代数方程:将变换后的方程整理成输出量 和输入量 的关系式。
- 写出传递函数:计算出 的比值。
示例:一个简单的R-C电路

考虑一个串联R-C电路,输入为电压 ,输出为电容两端的电压 。
-
建立微分方程: 根据基尔霍夫电压定律 (KVL),并结合电容电流公式 ,可得:
-
进行拉普拉斯变换 (设初始条件 ):
-
整理代数方程:
-
写出传递函数:
这个传递函数就完整地描述了这个R-C电路的动态特性。它只有一个极点 ,位于左半平面,因此该系统是稳定的。
总结
大概就是把时域内的微分积分之类的复杂运算,转换成s域的乘上或者除以一个s,然后再算出系统的传递函数(输出/输入),主要是要背一下三角函数对应的s计算。
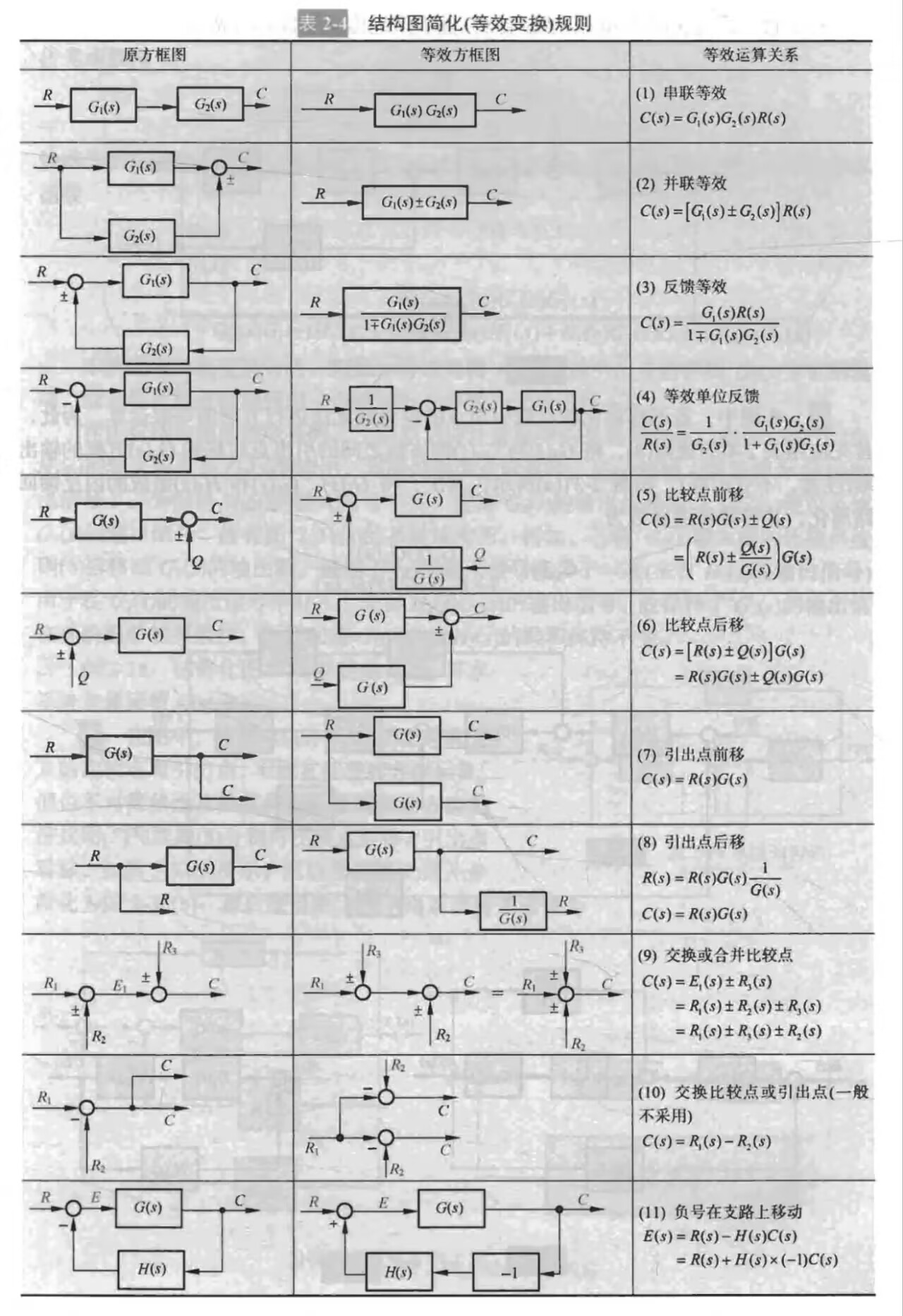
3.动态结构图的等效变换
这部分感觉还是比较符合直觉,下面贴个图片以供查询
4.信号流图与梅逊公式
4.1 信号流图的基本性质
信号流图是系统线性方程组的图形化表示,也是分析控制系统的一种工具,特别适用于复杂系统的传递函数求解。它与方框图(Block Diagram)类似,但更简洁。
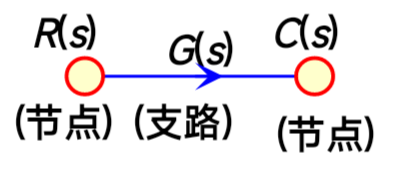
信号流图由节点和支路组成:
- 节点 (Nodes): 代表系统的变量或信号(例如 输入, 输出, 或任何中间信号 )。每个节点的值等于所有流入该节点的信号之和。
- 支路 (Branches): 是连接两个节点的有向线段。每条支路都有一个相关的增益 (Gain) 或传递函数(例如 或 )。信号沿着支路箭头方向流动,并在流过时乘以该支路的增益。
基本性质:
- 信号流动: 信号只能沿着箭头方向在支路上流动。
- 节点求和: 一个节点的值等于所有指向该节点的支路信号(支路增益 起始节点值)的总和。
- 信号广播: 从一个节点出发的信号,会传递给所有从该节点引出的支路。
- 支路性质: 支路相当于乘法器,信号流经支路时,被乘以支路增益而变成另一信号
4.2 核心术语 (Key Terminology)
要使用梅森增益公式,必须先理解以下几个关键概念:
- 通路 (Path): 沿着箭头方向,从一个节点到另一个节点经过的一系列连续支路,且任何节点都不能通过超过一次。
- 前向通路 (Forward Path): 从输入节点(源节点,只有信号流出)到输出节点(阱节点,只有信号流入)的一条通路。
- 回路 (Loop): 一条闭合的通路。它从一个节点出发,沿着箭头方向最终又回到该节点,且中间不重复经过任何节点。
- 回路增益 (Loop Gain): 回路中所有支路增益的乘积。
- 不接触回路 (Non-touching Loops): 如果两个(或多个)回路没有任何共同的节点,则称它们为不接触回路。
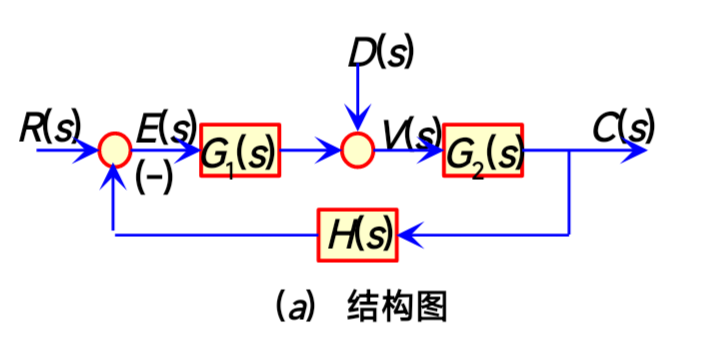
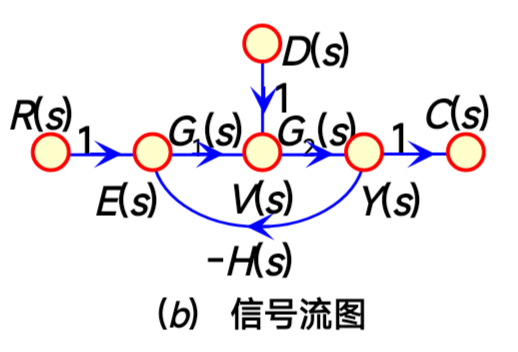
4.3 信号流图的绘制
由系统结构图绘制信号流图:
- 用小圆圈标出传递的信号,得到节点。
- 用线段表示结构图中的方框,用传递函数代表支路增益。(注意:信号流图的节点只表示变量的相加)
 |  |
 |  |
4.4 梅森增益公式 (Mason's Gain Formula)
梅森增益公式提供了一种直接从信号流图计算系统总传递函数 的方法,特别是在系统有多个前向通路和多个反馈回路时,它比化简方框图更高效。
公式如下:
1. :第 条前向通路的增益
是从输入节点到输出节点的第 条前向通路上的所有支路增益的乘积。一个系统可能有多条前向通路()。
2. :系统的特征式 (Determinant)
是信号流图的特征式,它由系统所有的回路增益决定。
- :所有单个回路增益的总和。
- :所有可能的两两不接触的回路增益乘积的总和。
- :所有可能的三个三个不接触的回路增益乘积的总和。
- 以此类推...
3. : 的余因子式
是为第 条前向通路 计算的特征式。其计算方法与 相同,但有一个关键区别:在计算中只考虑那些与前向通路 完全不接触(即没有任何共同节点)的回路。
换句话说,计算 时,你需要:
- 从 的表达式开始。
- 移除(设为0)所有与 接触(即共享至少一个节点)的回路增益项。
- 剩下的部分就是 。
如果 接触了系统中的所有回路,那么 。
计算步骤(Step-by-Step)
使用梅森增益公式的步骤如下:
- 识别所有前向通路: 找出所有从输入到输出的路径,并计算它们的增益 。
- 识别所有回路: 找出系统中所有的独立回路,并计算它们的增益 。
- 识别不接触回路: 找出所有互不接触的回路对、回路三元组等,并计算它们的增益乘积(如 , 等)。
- 计算 : 使用步骤2和3的结果,代入 来计算总特征式。
- 计算 : 对于每一条前向通路 ,找出所有与 不接触的回路,并使用它们来计算 。
- 代入公式: 将所有 和 以及 代入 得到最终的传递函数。
5.线性系统的时域分析法
时域分析法: 直接求出系统随时间变化的规律,并以此评价系统的性能
- 目的:我们给系统一个特定的输入信号 ,然后观察并分析系统的输出信号 是如何随时间 变化的 。
- 分析内容:这包括分析系统的稳定性(输出是否收敛)、快速性(响应速度有多快)和准确性(输出能否精确跟踪输入)。
- 典型输入信号:为了方便分析和比较不同系统的性能,我们通常会使用几种标准的测试信号:
- 脉冲信号 (Impulse Signal) :模拟瞬间的冲击。
- 阶跃信号 (Step Signal) :模拟突然的、持续的输入,如开关合上。
- 斜坡信号 (Ramp Signal):模拟等速变化的输入。
- 正弦信号 (Sinusoidal Signal) :分析系统对周期性信号的响应。
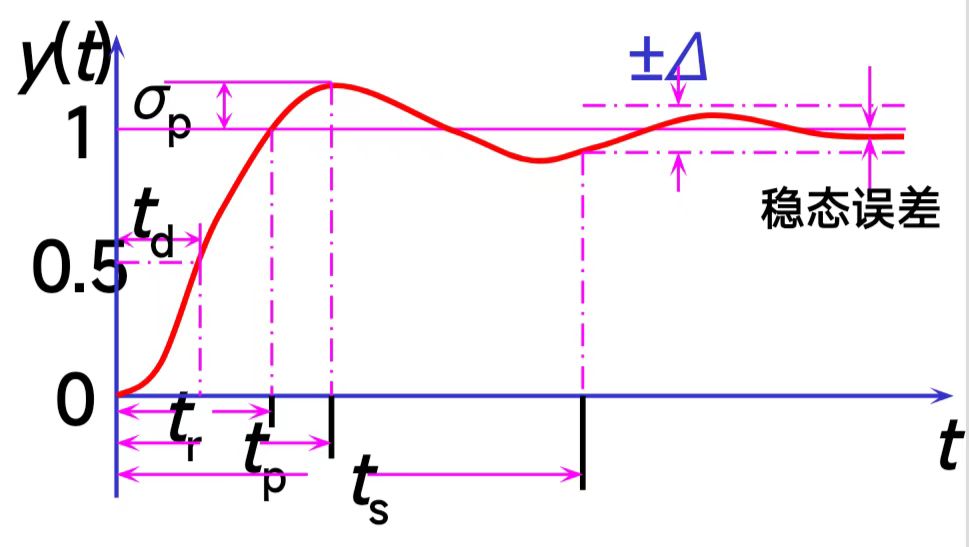
5.1动态和稳态性能指标
动态性能指标
-
延迟时间()
- 定义:响应曲线第一次到达其终值一半的时间。
-
上升时间 (Rise Time, )
- 定义:响应曲线第一次从最终值的 10% 上升到 90%(或 0% 到 100%)所需要的时间。
- 意义: 越短,表明系统的响应速度越快。
-
峰值时间 (Peak Time, )
- 定义:响应曲线从开始到第一次达到最大峰值所需要的时间。
- 意义: 也是衡量响应速度的指标之一。
-
最大超调量 (Percentage Overshoot, )
- 定义:响应曲线的最大峰值 超出其最终稳态值 的部分,与稳态值的百分比。
- 公式:
- 意义: 越小,系统的平稳性越好(振荡越小)。它是衡量系统相对稳定性的一个重要指标。
-
调节时间 (Settling Time, )
- 定义:响应曲线进入并永久保持在其稳态值 内(通常是 或 )所需的最短时间。
- 意义: 越短,表明系统过渡过程(包括振荡)消失得越快,系统越快达到稳定。
-
震荡次数()
- 定义:在内阶跃响应曲线穿越稳态值次数的一半为震荡次数。
参考如图所示:
稳态性能指标
稳态误差 (Steady-State Error) 是指系统进入稳态后,期望的输入信号 与实际的输出信号 之间的差值。
-
时域定义: (在您的课件中,这个误差信号被表示为 )
-
复频域计算 (终值定理): 在实际分析中,我们通常使用拉普拉斯变换的终值定理来计算稳态误差,这更为简便: 其中 是误差信号 的拉普拉斯变换。
5.2 一阶系统的时域分析
一阶系统(First-Order System)是指其动态特性可以用一阶微分方程来描述的系统。
微分方程:
-
传递函数:其最常见的形式是惯性环节,闭环传递函数为: 可以用来计算: 这个系统在 s 平面上有一个极点
P = -1/T。 -
核心参数:时间常数
是时间常数,它是一阶系统最重要的性能指标,量纲为时间(秒)。 决定了系统响应的快慢。
(a) 一阶系统的单位脉冲响应
- 输入:单位脉冲信号 ,其拉普拉斯变换 。
- 输出 。
- 时域响应 ()。
- 物理意义:系统在受到瞬间冲击后,其响应按指数规律衰减,衰减的快慢由 决定, 越小,衰减越快。
(b) 一阶系统的单位阶跃响应
这是分析一阶系统时最常用的响应。
- 输入:单位阶跃信号 ,其拉普拉斯变换 。
- 输出 。
- 时域响应 ()。
- 响应曲线特性:这是一条从 0 逐渐上升并最终趋近于 1 的指数曲线。
- 初始值:。
- 最终值:。
- 关键时间点:
- 当 (一个时间常数) 时,响应达到 ,即达到终值的 63.2%。
- 当 时,响应达到 (86.5%)。
- 当 时,响应达到 (95%)。
- 当 时,响应达到 (98.2%)。
- 延迟时间:
- 上升时间:
- 结论: 越小,系统响应越快,达到稳态(终值)所需的时间越短。
(c) 稳态误差分析 (Steady-State Error)
-
目的:衡量系统过渡过程结束后,输出 跟随输入 的精度。
-
误差 取决于:
- 系统结构(型别)
- 输入信号类型
- 扰动信号
-
系统型别 (Type v):
- 指系统的开环传递函数 中,在 处积分环节( 因子)的个数 。
- :0 型系统
- :I 型系统
- :II 型系统
- 越高,稳态精度越强。
-
稳态误差系数 :
- 位置误差系数 (用于阶跃输入):
- 速度误差系数 (用于斜坡输入):
- 加速度误差系数 (用于抛物线输入):
-
计算总结表:
| 系统型别 (v) | 阶跃输入 | 斜坡输入 | 抛物线输入 |
|---|---|---|---|
| v = 0 | (常数) | ||
| v = 1 | (常数) | ||
| v = 2 | (常数) |
- 扰动稳态误差 :
- 分析方法类似,但此时是计算扰动 到输出 的传递函数 ,然后使用终值定理求 。
本章 题型解法总结
本章的计算题主要有以下三类,有时会结合在一起(就像您上一道例题):
题型一:求解动态性能指标
求解:
- 求闭环传递函数 。
- 使用梅森增益公式或化简方框图。
- 求特征方程 (即 的分母)。
- 判断系统阶数:
- 如果 是二阶:
- 将其与标准型 对比。
- 解出 和 。
- 代入公式:
- (取 5% 误差带) 或 (取 2% 误差带)
- 如果 是高阶:
- (考试中)通常会告知你可以近似为二阶系统,或者题目本身会包含零极点对消,使其降阶为二阶。
- 如果无法降阶,则无法直接使用二阶公式。
- 如果 是二阶:
题型二:判断系统稳定性 (劳斯判据)
- 求特征方程 。
- 注意:这里用的是开环 来求闭环特征方程。
- 整理方程:将 整理为 的多项式形式。
- 建立劳斯表。
- 分析第一列:
- 问题:“判断系统是否稳定?”
- 解法:检查第一列是否全为正。是,则稳定;否,则不稳定。
- 问题:“求系统稳定时 的取值范围?”
- 解法:劳斯表中包含 的项,对第一列所有项建立不等式 ,解出 的公共范围。
- 问题:“求系统临界稳定时的 值和振荡频率?”
- 解法:令劳斯表某一行( 行)为 0,解出 值(即 )。再利用 行的上一行( 行)建立辅助方程 ,解出的 即为振荡频率。
- 问题:“判断系统是否稳定?”
题型三:求解稳态误差 ()
- 确定输入信号:是阶跃(位置)、斜坡(速度)还是抛物线(加速度)。
- 确定系统型别 :
- 找出系统的开环传递函数 (在单位反馈中即为 )。
- 看 中 在分母上的次数 。
- 选择对应公式:
- v=0,阶跃输入:
- v=1,斜坡输入:
- v=2,抛物线输入:
- (如果型别 大于输入信号的阶次, 恒为 0;如果 小于输入信号阶次, 恒为 )。
- v=0,阶跃输入:
我们以上一题中出现过的这个标准负反馈方框图为例 :
- :输入
- :输出
- :前向通道传递函数
- :反馈通道传递函数
下面我们来逐一分解您提到的几个概念:
1. 核心定义
a) 和
- 是从误差信号 到输出 的传递函数(包含了控制器和被控对象)。
- 是从输出 反馈到求和点的传递函数(通常是传感器)。
- 关系:它们是系统的基本组成部分。
b) 开环传递函数 (Open-Loop Transfer Function)
- 是什么? 就是 。
- 物理意义:想象一下,我们在 处的输入断开(),然后在求和点将反馈回路“剪断”,从 处测量信号。开环传递函数就是反馈信号 与误差信号 之间的比值:。
- 用途:它不代表系统的最终输出! 它的作用是用来分析系统的稳态性能和**(在频域中)分析稳定性**。
- 稳态误差:我们用 来确定系统的型别 (Type),并计算稳态误差系数 。
- 稳定性分析:在第4、5章中,奈奎斯特图、伯德图都是画的 的曲线。
c) 闭环传递函数 (Closed-Loop Transfer Function)
- 是什么? 整个系统从输入 到输出 的总传递函数 。
- 公式:对于这个负反馈系统,它等于:
- 用途:它代表了系统的整体特性。
- 求输出:当给定一个输入 (如阶跃信号 ),系统的实际输出 。
- 动态性能:系统的超调量、调节时间等动态指标,是由这个函数的特性决定的。
d) 特征方程 (Characteristic Equation)
- 是什么? 它是闭环传递函数的分母置为 0。
- 公式:
- 关系:
- 它是 (开环)和 (闭环)之间的桥梁。
- 它的根( 的解)被称为系统的闭环极点。
- 用途:系统的所有“内禀”特性(动态性能和稳定性)都由它决定!
- 稳定性:判断系统稳定,就是判断 的所有根(闭环极点)是否都在 S 平面的左半边。劳斯判据 (Routh-Hurwitz) 就是直接分析这个方程的系数。
- 动态性能:二阶系统的 和 就是通过将 与标准型 对比得来的。
2. 关系总结与做题指南 (重要)
您会混淆,是因为在做不同类型的题目时,我们用了不同的函数。请记住这个指南:
“如果题目问我...”
1. “...系统的稳态误差 是多少?”
- 用谁? 开环传递函数 。
- 怎么做?
- 求出 。
- 根据 在 处 的幂次,确定系统型别 。
- 根据输入信号(阶跃、斜坡)和 的值,求 。
- 用 或 等公式计算。
2. “...系统的稳定性如何? (K的取值范围)”
- 用谁? 特征方程 。
- 怎么做?
- 求出 。
- 写出特征方程 ,并将其通分,整理成一个 的多项式 。
- 对这个多项式使用劳斯判据,分析第一列的符号,来判断稳定性或 的范围。
3. “...系统的动态性能指标 () 是多少?”
- 用谁? 特征方程 。
- 怎么做?
- 写出特征方程 并整理。
- (题目通常是二阶,或可近似为二阶)将其与标准形式 对比。
- 解出 和 。
- 代入 和 的公式进行计算。
4. “...系统在某输入 下的输出 是什么?”
- 用谁? 闭环传递函数 。
- 怎么做?
- 先求 和 。
- 代入公式求出 。
- 。
总结:
- 开环 :用来分析稳态误差。
- 特征方程 :用来分析稳定性和动态性能。
- 闭环 :用来求系统总输出。
二阶系统单位阶跃响应性能指标笔记
1. 标准形式
闭环传递函数: 其中: 为阻尼比, 为自然频率。
2. 阻尼状态分类
| 阻尼比 | 状态 | 极点分布 | 响应特征 |
|---|---|---|---|
| 无阻尼 | 互为共轭虚根 | 等幅振荡() | |
| 欠阻尼 | 互为共轭复根 | 衰减振荡 (考试重点) | |
| 临界阻尼 | 相等实根 | 无超调,最快单调上升 | |
| 过阻尼 | 不等实根 | 无超调,反应迟钝 |
3. 欠阻尼系统关键参数
- 衰减系数: (决定收敛快慢)
- 阻尼振荡频率: (实际振荡频率)
- 阻尼角:
4. 动态性能指标公式 (必背)
(1) 上升时间
输出第一次达到稳态值 1 的时间。
(2) 峰值时间
输出达到第一个峰值的时间。
(3) 超调量
(4) 调节时间
- 5% 误差带:
- 2% 误差带:
5. 极点位置与性能的关系
- 实部 ():决定调节时间 (离虚轴越远越快)。
- 虚部 ():决定振荡频率(离实轴越远频率越高)。
- 辐角 ():决定超调量(角度越小, 越大,超调越小)。
稳态误差
1. 给定输入作用下的稳态误差 (输入 R(s))
判断依据:看整个开环传递函数 的系统型别 (分母中单独 的个数)。
| 系统型别 | 阶跃输入 | 斜坡输入 | 加速度输入 |
|---|---|---|---|
| 0 型系统 () | |||
| I 型系统 () | |||
| II 型系统 () |
静态误差系数公式:
- 位置误差系数: (仅限0型)
- 速度误差系数: (仅限I型)
- 加速度误差系数: (仅限II型)
2. 扰动输入作用下的稳态误差 (扰动 N(s))
判断依据:看扰动作用点之前的前向通路 中积分环节的个数 。 关键定义: 为扰动作用点之前的开环增益。
| 扰动前型别 () | 阶跃扰动 | 斜坡扰动 | 加速度扰动 |
|---|---|---|---|
| 0 型 () | |||
| I 型 () | |||
| II 型 () |
3. 核心记忆口诀
- 输入看整体:整个开环积分环节越多,能消除的输入误差阶次越高。
- 扰动看前面:只有扰动点前面的积分环节(门卫),才能消除扰动带来的稳态误差。如果积分在扰动后面,对消除常值扰动无效。
- 系数对应:
- 阶跃对应 (或 )
- 斜坡对应
- 加速度对应
- 公式形式基本都是 (除了0型阶跃是 )。
根轨迹绘图法则与参数计算
1. 基础法则
- 起点:开环极点 ()。
- 终点:开环零点 () 或无穷远处。
- 分支数:等于开环极点数 。
- 对称性:关于实轴对称。
- 实轴法则:右侧开环零极点总数为奇数的区域。
2. 关键参数计算公式
(1) 渐近线 (Asymptotes)
当 时存在。
- 交点 (重心):
- 倾角:
- :
- :
- :
(2) 分离点与汇合点 (Break points)
实数轴上的重根点。
- 通用条件:
- 速算公式: (即:到所有极点距离倒数之和 = 到所有零点距离倒数之和)
- 注意:解出的 必须位于实轴根轨迹区域内才有效。
(3) 与虚轴交点
- 方法 A:劳斯判据,令某行全为 0,求临界 ,用辅助方程求 。
- 方法 B:令 代入特征方程,实部虚部双双为 0。
(4) 出射角与入射角 (相角条件)
用于复数极点/零点。
- 出射角 (极点):
- 入射角 (零点):
(5) 根之和 (Vieta's Formulas)
如果 ,则闭环极点之和为常数: (意味着当某些根向左跑,一定有其他根向右跑)
3. 模值条件 (求某点对应的 K)
根轨迹上任意一点 对应的增益 :
频域分析:伯德图绘制速查
1. 准备工作:标准形式
- 必须将常数项化为 1,提取出的系数归入 。
- 频率坐标: 轴是拉长的对数坐标。
- 幅值坐标: (dB)。
2. 典型环节绘制表
| 环节 | 转折频率 | 幅频斜率变化 | 相位极限变化 |
|---|---|---|---|
| 常数 | 无 | 0 | () 或 |
| 积分 | 无 | 全程 | 恒定 |
| 微分 | 无 | 全程 | 恒定 |
| 一阶极点 | -20 dB/dec | ||
| 一阶零点 | +20 dB/dec | ||
| 二阶极点 | -40 dB/dec |
3. 快速手绘流程 (渐近线法)
- 标出转折频率:在横轴上标出所有 和 ,按从小到大排序。
- 确定低频起点:
- 过点 。
- 画一条斜率为 dB/dec 的直线。
- 注:如果 处于某转折频率之后,需反向延长确定起点。
- 逐段作图:
- 向高频延伸,每遇到一个极点转折频率,斜率 减 20。
- 每遇到一个零点转折频率,斜率 加 20。
- 修正:
- 一阶环节在转折频率处,实际值比渐近线低(极点)或高(零点) 3dB。
- 二阶环节在 处可能有谐振峰 ()。
4. 稳定性判据 (重点)
- 穿越频率 :幅值 穿过 0dB 线的频率。
- 相位裕度 (PM):
- 若 ,系统闭环稳定。
- 工程推荐:。
频域分析:奈氏图 (Nyquist Plot) 绘制速查
1. 核心思想
奈氏图是频率特性 在复平面上的极坐标轨迹 ()。
2. 绘制三要素
(1) 起点 () —— 看系统型别
| 型别 | 起点位置 | 相角 |
|---|---|---|
| 0 型 | 实轴 处 | |
| I 型 | 虚轴无穷远处 | (渐近线 ) |
| II 型 | 实轴无穷远处 |
(2) 终点 () —— 看相对阶数 所有物理系统终点均趋向于原点。
- 进入角度:
- : 沿 (负虚轴) 进
- : 沿 (负实轴) 进
- : 沿 (正虚轴) 进
(3) 关键交点
- 与负实轴交点:令 ,求出 ,代入得 。
- 此点用于判断稳定性(看是否越过 -1)。
- 与虚轴交点:令 。
3. 常见形状速记 (设 )
- 一阶惯性 :以 为圆心,半径 的半圆 (第四象限)。
- 积分+惯性 :从 无穷远出发,直线冲向原点 (始终在 )。
- 三阶系统 :从 无穷远出发,绕过第三象限,穿过负实轴,在第二象限进原点。
4. 稳定性判据 (Nyquist Criterion)
- P: 开环右半平面极点数 (通常为0)。
- N: 曲线逆时针包围 点的圈数。
- Z: 闭环右半平面极点数。
- 结论:若 ,则闭环稳定。
频域稳定判据速查
1. 奈奎斯特判据 (Nyquist Criterion)
通用公式:
- Z: 闭环右极点数 (必须为 0 才稳定)。
- P: 开环右极点数 (通常已知,多为 0)。
- N: 曲线逆时针包围 的圈数。
常用推论 (当 时):
- 若奈氏图不包围 ,则闭环稳定。
- 若奈氏图顺时针包围 ,则闭环不稳定。
- 若曲线恰好穿过 ,则临界稳定。
2. 对数稳定判据 (Bode Criterion)
(仅适用于最小相位系统,即 P=0)
关键频率定义
- 截止频率 : (幅值穿过零分贝线)
- 穿越频率 : (相位穿过-180度线)
稳定性裕度计算 (必考)
系统稳定的充要条件:同时满足 PM > 0 和 GM > 0。
(1) 相位裕度 (Phase Margin, ) 考察点:
- 含义:在幅值降为 1 (0dB) 时,相位距离 -180° 还有多少“余额”。
- 标准: 稳定。工程推荐 左右。
(2) 幅值裕度 (Gain Margin, 或 ) 考察点:
- 含义:在相位反向 (-180°) 时,幅值衰减到了 0dB 以下多少。
- 标准: 稳定。工程推荐 。
3. 快速判断口诀
在伯德图上:
- 稳定: 在 的左边 ()。 (先没劲儿,后反向)
- 不稳定: 在 的右边 ()。 (反向了还有劲儿)
频域分析:裕度计算速查 (PM & GM)
1. 核心定义
- 截止频率 :满足 (0dB) 的频率。
- 穿越频率 :满足 的频率。
2. 计算流程表
| 步骤 | 相位裕度 (PM) | 幅值裕度 (GM) |
|---|---|---|
| Step 1 | 找 :令 解方程 | 找 :令 解方程 |
| Step 2 | 算相角: | 算幅值: |
| Step 3 | 求裕度: | 求裕度: 或 |
| 判据 | 则稳定 | () 则稳定 |
3. 常见系统相角公式
- 积分环节 :
- 惯性环节 :
- 一阶微分 :
- 延迟环节 : (注意单位换算)
4. 考试解题模板
- 写出 的幅值表达式和相角表达式。
- 列出方程 求 。
- 代入 计算。
- (若需要) 列出 求 。
- 代入 计算。
频域校正:串联超前与滞后校正
1. 串联超前校正 (Lead) —— "提速增稳"
传递函数:
- 零极分布:零点 靠近原点,极点 远离原点。
- 核心公式 (根据所需相位裕度求 ):
- 设计点:最大相位频率 需对准新的截止频率。
- 特点:带宽 ,响应速度 ,调节时间 ,抗噪性 。
2. 串联滞后校正 (Lag) —— "降速提精"
传递函数:
- 零极分布:极点 靠近原点 (利用高增益),零点 稍远。
- 核心机理: 利用高频段幅值衰减 ,使截止频率 左移(降低),利用系统低频段本身较好的相位储备。
- 设计原则: 零点 选在 的 0.1 倍处 (),以避免相位滞后副作用。
- 特点:带宽 ,响应速度 ,稳态误差 (精度高),抗噪性 。
3. 简单口诀
- 超前:零点在前,相位向上拱,系统跑得快。
- 滞后:极点在前,增益往下拉,系统这就稳。# 非线性系统分析速查
1. 核心特征
- 不满足叠加原理。
- 稳定性取决于输入信号的大小和初始条件。
- 特有现象:自激振荡 (极限环)、频率畸变、跳跃谐振。
2. 典型非线性环节
- 饱和: (大信号增益下降)。
- 死区:小信号无输出,大信号才有增益。
- 继电器:只有 两种输出 (导致恒幅振荡)。
3. 描述函数法 (Describing Function)
前提:线性部分具有低通滤波特性 (滤除高频谐波)。
定义:
- 是输入幅值 的函数。
稳定性判据 ( 与 的关系) 令 。
- 相交:存在自激振荡的可能性。
- 判断极限环稳定性:
- 沿着 增加的方向,如果在交点处, 曲线从 的不稳定区域(包围区) 进入 稳定区域(非包围区),则该极限环是稳定的 (即物理上存在的自激振荡)。
- 反之则不稳定。
4. 记忆口诀
- 饱和特性:限制了无穷大,让不稳定变稳定 (抑制发散)。
- 死区特性:小了不动,大了才动,容易导致定位误差。
- 判振荡:画出奈氏图 ,画出负倒 ,相交就有环,穿出即为稳。
自动控制原理:期末/考研高频考点手册 (核心总结版)
第一章:控制系统导论 (分值:10分)
- 重点技能:根据物理原理图绘制方块图。
- 核心记忆点:
- 明确识别:输入量、输出量、控制器、执行机构、控制对象、反馈元件。
- 注意比较点的符号,通常情况下系统默认为负反馈。
第二章:数学模型 (分值:15分)
- 重点技能:熟练运用梅森增益公式 (Mason's Formula) 求解传递函数。
- 核心公式:
- 关键步骤:准确识别所有前向通路 、所有回路 (Loop) 以及两两不相交回路。
第三章:时域分析 (分值:20分)
- 重点技能:一阶、二阶系统性能指标的定量计算。
- 二阶系统标准形式:
- 核心指标:
- 超调量 :仅与阻尼比 相关。
- 调节时间 :误差带为 时 ;误差带为 时 。
- 稳态误差 :掌握终值定理,区分位置、速度、加速度误差系数。
第四章:根轨迹分析 (分值:20分)
- 重点技能:根轨迹绘制步骤与系统参数分析。
- 核心法则:
- 起点/终点:从开环极点出发,终止于开环零点。
- 实轴法则:实轴上轨迹段右侧的零极点总数必须为奇数。
- 分离点方程:
- 临界稳定性:通过 代入特征方程计算轨迹与虚轴的交点。
第五、六章:频域分析与校正 (分值:25分)
- 重点技能:伯德图绘制、奈氏判据与系统校正。
- 核心知识点:
- 裕量判断:相位裕度 (PM) 和 幅值裕度 (GM) 是判定闭环稳定性的核心指标。
- 奈奎斯特稳定性判据:
- 串联校正:
- 超前校正:主要用于提高系统响应速度及增加相位裕度。
- 滞后校正:主要用于提高系统稳态精度,抑制高频噪声。
第八章:非线性系统分析 (分值:10分)
- 重点技能:使用描述函数法判定系统稳定性。
- 自振判定条件:
- 特征方程满足:
- 图形表现:线性部分奈氏曲线 与负倒描述函数曲线 产生交点。